آونگ (مکانیک)
آونگ یا پاندول (به انگلیسی: Pendulum) جسمی است که از یک تکیهگاه ثابت آویزان شده و آزادانه تحت تأثیر نیروی گرانش به عقب و جلو نوسان میکند. هنگامی که یک آونگ از حالت تعادل یا استراحت خود به سمت جانبی جابجا میشود، تحت تأثیر نیروی بازگردانندهای ناشی از گرانش قرار میگیرد که آن را به سمت موقعیت تعادل شتاب میدهد. وقتی رها میشود، نیروی بازگرداننده که بر جرم آونگ اثر میگذارد، باعث میشود که حول نقطه تعادل نوسان کرده و به عقب و جلو تاب بخورد. ریاضیات آونگها بهطور کلی بسیار پیچیده است. با این حال، میتوان فرضیات سادهکنندهای انجام داد که در مورد آونگ ساده اجازه میدهد معادلات حرکت برای نوسانات با زاویه کوچک بهصورت تحلیلی حل شوند.
آونگ گرانشی ساده
یک آونگ گرانشی ساده[۱] یک مدل ریاضی ایدهآل از یک آونگ واقعی است.[۲][۳][۴] این مدل شامل وزنهای (یا باب) در انتهای یک طناب بدون جرم است که از یک محور آویزان شده و فاقد اصطکاک است. از آنجا که در این مدل اتلاف انرژی اصطکاکی وجود ندارد، وقتی جابجایی اولیه به آن داده شود، با دامنه ثابت به عقب و جلو نوسان میکند. این مدل بر اساس فرضیات زیر است:
- میله یا طناب بدون جرم، غیرقابل کشش است و همواره تحت کشش باقی میماند.
- وزنه (باب) یک جرم نقطهای است.
- حرکت در دو بُعد رخ میدهد.
- حرکت انرژی خود را بر اثر اصطکاک خارجی یا مقاومت هوا از دست نمیدهد.
- میدان گرانشی یکنواخت است.
- تکیهگاه بیحرکت است.
معادله دیفرانسیل حاکم بر حرکت یک آونگ ساده عبارت است از:
|
() |

که در آن g بزرگی میدان گرانشی، ℓ طول میله یا طناب، و θ زاویه آونگ نسبت به خط عمود است.
اثباتها
اثبات (معادله ۱) با استفاده از «نیرو» |
|---|
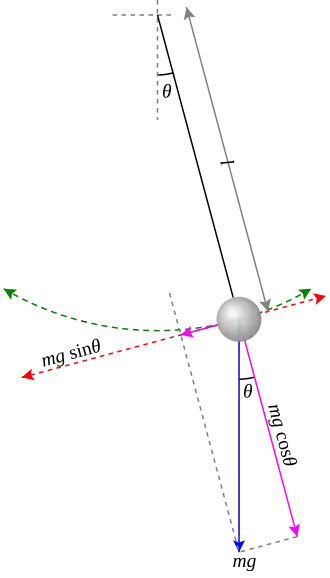 شکل ۱ در سمت چپ را در نظر بگیرید که نیروهای وارد بر یک آونگ ساده را نشان میدهد. توجه داشته باشید که مسیر آونگ یک کمان از دایره را طی میکند. زاویه θ بر حسب رادیان اندازهگیری میشود و این نکته برای این فرمول حیاتی است. پیکان آبی نیروی گرانش وارد بر وزنه است و پیکانهای بنفش همان نیرو هستند که به مؤلفههای موازی و عمود بر حرکت لحظهای وزنه تجزیه شدهاند. جهت سرعت لحظهای وزنه همواره در امتداد محور قرمز است که محور مماسی در نظر گرفته میشود زیرا جهت آن همیشه مماس بر دایره است. قانون دوم نیوتن را در نظر بگیرید: که در آن F مجموع نیروهای وارد بر جسم، m جرم و a شتاب است. معادله نیوتن را میتوان تنها برای محور مماسی اعمال کرد. این به این دلیل است که تنها تغییرات سرعت مورد نظر است و وزنه مجبور به ماندن در مسیر دایرهای است. پیکان بنفش کوتاه نشاندهنده مؤلفه نیروی گرانش در محور مماسی است و میتوان با استفاده از مثلثات بزرگی آن را تعیین کرد. بنابراین: که در آن g شتاب ناشی از گرانش در نزدیکی سطح زمین است. علامت منفی در سمت راست نشان میدهد که θ و a همیشه در جهت مخالف یکدیگر هستند. این منطقی است زیرا وقتی آونگ بیشتر به سمت چپ تاب میخورد، انتظار میرود که به سمت راست شتاب بگیرد. این شتاب خطی a در امتداد محور قرمز را میتوان با فرمولهای طول کمان به تغییرات زاویه θ مرتبط کرد؛ s طول کمان است: بنابراین: |




اثبات (معادله ۱) با استفاده از «گشتاور» |
|---|
|
معادله (۱) را میتوان با استفاده از دو تعریف برای گشتاور به دست آورد. ابتدا با تعریف گشتاور روی وزنه آونگ با استفاده از نیروی ناشی از گرانش شروع میکنیم. که در آن l بردار طول آونگ و Fg نیروی ناشی از گرانش است. فعلاً فقط بزرگی گشتاور روی آونگ را در نظر میگیریم. که در آن m جرم آونگ، g شتاب ناشی از گرانش، l طول آونگ و θ زاویه بین بردار طول و نیروی ناشی از گرانش است. سپس تکانه زاویهای را بازنویسی میکنیم. دوباره فقط بزرگی تکانه زاویهای را در نظر بگیرید. و مشتق زمانی آن: سپس میتوان بزرگیها را با استفاده از τ = dL/dt مقایسه کرد: بنابراین: که همان نتیجه به دست آمده از طریق تحلیل نیرو است. |








اثبات (معادله ۱) با استفاده از «انرژی» | |||||||
|---|---|---|---|---|---|---|---|
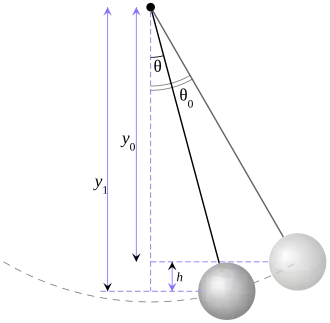 این معادله همچنین میتواند از طریق اصل پایستگی انرژی مکانیکی به دست آید: هر جسمی که مسافت عمودی را سقوط کند، انرژی جنبشی برابر با آنچه در سقوط از دست داده به دست میآورد. به عبارت دیگر، انرژی پتانسیل گرانشی به انرژی جنبشی تبدیل میشود. تغییر در انرژی پتانسیل برابر است با: تغییر در انرژی جنبشی (جسم از حالت سکون شروع به حرکت کرده) برابر است با: از آنجا که هیچ انرژی از دست نمیرود، افزایش در یکی باید برابر با کاهش در دیگری باشد: تغییر سرعت برای یک تغییر ارتفاع معین را میتوان به صورت زیر بیان کرد: با استفاده از فرمول طول کمان در بالا، این معادله را میتوان بر حسب dθ/dt بازنویسی کرد: که در آن h مسافت عمودی است که آونگ سقوط کرده است. به شکل ۲ نگاه کنید که مثلثات یک آونگ ساده را نشان میدهد. اگر آونگ نوسان خود را از زاویه اولیه θ0 آغاز کند، آنگاه y0، فاصله عمودی از نقطه اتکا، برابر است با: به طور مشابه، برای y1 داریم: سپس h تفاضل این دو است: بر حسب dθ/dt داریم:
این معادله به عنوان انتگرال اول حرکت شناخته میشود؛ سرعت را بر حسب موقعیت میدهد و شامل یک ثابت انتگرالگیری مربوط به جابجایی اولیه (θ0) است. سپس، با اعمال قاعده زنجیرهای نسبت به زمان مشتق میگیریم تا شتاب به دست آید: که همان نتیجه به دست آمده از طریق تحلیل نیرو است. |











اثبات (معادله ۱) با استفاده از «لاگرانژ» |
|---|
 معادله ۱ را میتوان همچنین از طریق مکانیک لاگرانژی به دست آورد. به طور خاص، با استفاده از معادلات اویلر-لاگرانژ (یا معادلات نوع دوم لاگرانژ) با تعیین لاگرانژی سیستم ()، قیدها () و حل دستگاه معادلات زیر:
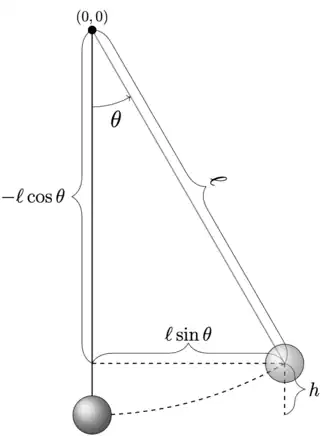
اگر مبدأ دستگاه مختصات دکارتی به عنوان نقطه آویز (یا لولا) تعریف شود، آنگاه موقعیت وزنه برابر است با:
و سرعت وزنه، که از طریق مشتقگیری مختصات نسبت به زمان محاسبه میشود (با استفاده از نشانگذاری نقطه برای نشان دادن مشتقات زمانی):
بنابراین، لاگرانژی برابر است با:
معادله اویلر-لاگرانژ (مفرد است زیرا تنها یک قید وجود دارد) بدین صورت است:
که میتوان آن را بازآرایی کرد تا با معادله ۱ که از طریق تحلیل نیرو به دست آمد، مطابقت داشته باشد:
استخراج از طریق مکانیک لاگرانژی، اگرچه برای یک آونگ ساده زیادهروی به نظر میرسد، اما برای سیستمهای پیچیدهتر و آشوبناک، مانند آونگدوبل، بسیار مفید است. |











تقریب زاویه کوچک

معادله دیفرانسیل ارائه شده در بالا به سادگی حل نمیشود و هیچ راه حلی وجود ندارد که بتوان آن را بر حسب توابع مقدماتی نوشت. با این حال، با افزودن یک محدودیت به اندازه دامنه نوسان، فرمی به دست میآید که حل آن به سادگی امکانپذیر است. اگر فرض شود که زاویه بسیار کمتر از ۱ رادیان است (اغلب کمتر از ۰٫۱ رادیان یا حدود ۶ درجه ذکر میشود)، یا: آنگاه با جایگزینی sin θ در معادله ۱ با استفاده از تقریب زاویه کوچک: معادله یک نوسانگر هماهنگ به دست میآید:



خطای ناشی از این تقریب از مرتبه θ3 است (بر اساس بسط تیلور برای sin θ).
فرض کنید زاویه شروع θ0 باشد. اگر فرض شود که آونگ با سرعت زاویهای صفر رها میشود، راه حل به صورت زیر خواهد بود:

این حرکت یک حرکت هماهنگ ساده است که در آن θ0 دامنه نوسان (یعنی حداکثر زاویه بین میله آونگ و خط عمود) است. دوره تناوب تقریبی حرکت برابر است با:

که به عنوان قانون کریستیان هویگنس برای دوره تناوب شناخته میشود. توجه داشته باشید که تحت تقریب زاویه کوچک، دوره تناوب مستقل از دامنه θ0 است؛ این خاصیت همزمانی (ایزوکرونیسم) است که گالیله کشف کرد.
قاعده سرانگشتی برای طول آونگ
نتیجه میدهد:


اگر از واحدهای SI استفاده شود (یعنی اندازهگیری بر حسب متر و ثانیه)، و با فرض اینکه اندازهگیری در سطح زمین انجام میشود، آنگاه g ≈ 9.81 m/s2 و g/π2 ≈ 1 m/s2 (۰٫۹۹۴ تقریب تا ۳ رقم اعشار است).
بنابراین، تقریبهای نسبتاً معقول برای طول و دوره تناوب عبارتند از: که در آن T0 تعداد ثانیههای بین دو تپش (یک تپش برای هر طرف نوسان) است و l بر حسب متر اندازهگیری میشود.

دوره تناوب با دامنه دلخواه

برای دامنههای فراتر از تقریب زاویه کوچک، میتوان دوره تناوب دقیق را ابتدا با معکوس کردن معادله سرعت زاویهای به دست آمده از روش انرژی (معادله ۲) محاسبه کرد: و سپس انتگرالگیری روی یک چرخه کامل، یا دو برابر نیمچرخه یا چهار برابر ربعچرخه که منجر میشود به:





توجه داشته باشید که این انتگرال با نزدیک شدن θ0 به خط عمود واگرا میشود: بنابراین آونگی با انرژی دقیقاً کافی برای عمودی شدن، هرگز واقعاً به آنجا نخواهد رسید. (برعکس، آونگی که نزدیک به حداکثر خود است میتواند زمان دلخواهی طول بکشد تا پایین بیاید.)

این انتگرال را میتوان بر حسب انتگرالهای بیضوی به صورت زیر بازنویسی کرد: که در آن F انتگرال بیضوی ناقص نوع اول است که به صورت زیر تعریف میشود:


یا به طور مختصرتر با جانشانی: که θ را بر حسب u بیان میکند،


در اینجا K انتگرال بیضوی کامل نوع اول است که به صورت زیر تعریف میشود:
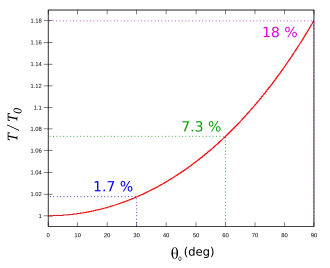
برای مقایسه تقریب با راه حل کامل، دوره تناوب یک آونگ به طول ۱ متر را روی زمین (g = 9.80665 m/s2) در زاویه اولیه ۱۰ درجه در نظر بگیرید: تقریب خطی (زاویه کوچک) مقدار زیر را میدهد:



تفاوت بین این دو مقدار، کمتر از ۰٫۲٪ است که بسیار کمتر از خطای ناشی از تغییرات g در موقعیتهای جغرافیایی مختلف است.
از اینجا به بعد راههای زیادی برای محاسبه انتگرال بیضوی وجود دارد.
راه حل چندجملهای لژاندر برای انتگرال بیضوی
با توجه به (معادله ۳) و راه حل چندجملهای لژاندر برای انتگرال بیضوی: که در آن n!! نشاندهنده دوفاکتوریل است، یک راه حل دقیق برای دوره تناوب آونگ ساده عبارت است از:


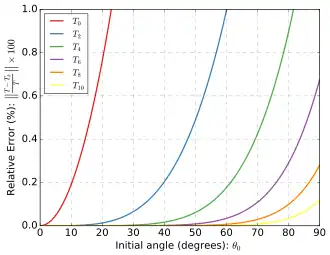
شکل ۴ خطاهای نسبی را با استفاده از سری توانی نشان میدهد. T0 تقریب خطی است، و T2 تا T10 به ترتیب شامل جملاتی تا توانهای ۲ تا ۱۰ هستند.
راه حل سری توانی برای انتگرال بیضوی
فرمولبندی دیگری از راه حل فوق را میتوان یافت اگر از سری مکلورن زیر: در راه حل چندجملهای لژاندر بالا استفاده شود. سری توانی حاصل عبارت است از:[۵]

کسرهای بیشتر در دانشنامه برخط دنبالههای صحیح (OEIS) موجود است؛ صورت کسرها در دنباله (دنباله A223067 در OEIS) و مخرجها در دنباله (دنباله A223068 در OEIS) قرار دارند.

راه حل میانگین حسابی-هندسی برای انتگرال بیضوی
با توجه به (معادله ۳) و راه حل میانگین حسابی-هندسی برای انتگرال بیضوی: که در آن M(x,y) میانگین حسابی-هندسی x و y است.

این منجر به یک فرمول جایگزین و با همگرایی سریعتر برای دوره تناوب میشود:[۶][۷][۸]

اولین تکرار (ایترِیشن) این الگوریتم نتیجه میدهد:

این تقریب دارای خطای نسبی کمتر از ۱٪ برای زوایای تا ۹۶٫۱۱ درجه است.[۶] از آنجا که ، این عبارت را میتوان به صورت خلاصهتر نوشت:


بسط مرتبه دوم به کاهش مییابد.


تکرار دوم این الگوریتم نتیجه میدهد:

این تقریب دوم دارای خطای نسبی کمتر از ۱٪ برای زوایای تا ۱۶۳٫۱۰ درجه است.[۶]
فرمولهای تقریبی برای دوره تناوب آونگ غیرخطی
اگرچه دوره تناوب دقیق را میتوان برای هر دامنه محدود θ0 < π rad با محاسبه انتگرال بیضوی کامل مربوطه (که در آن ) تعیین کرد، اما در کاربردها اغلب از این کار اجتناب میشود زیرا بیان این انتگرال به صورت یک فرم بسته بر حسب توابع مقدماتی امکانپذیر نیست. این امر راه را برای تحقیق بر روی فرمولهای تقریبی ساده برای افزایش دوره تناوب آونگ با افزایش دامنه باز کرده است (که در آزمایشگاههای فیزیک مقدماتی، مکانیک کلاسیک، الکترومغناطیس، آکوستیک، الکترونیک، ابررسانایی و غیره مفید است).[۹] فرمولهای تقریبی یافت شده توسط نویسندگان مختلف را میتوان به صورت زیر طبقهبندی کرد:



- فرمولهای «زاویه نه چندان بزرگ»، یعنی آنهایی که تخمینهای خوبی برای دامنههای زیر رادیان (یک حد طبیعی برای یک وزنه در انتهای یک ریسمان انعطافپذیر) ارائه میدهند، اگرچه انحراف نسبت به دوره دقیق به صورت یکنواخت با دامنه افزایش مییابد و برای دامنههای نزدیک به رادیان نامناسب هستند. یکی از سادهترین فرمولهای یافت شده در متون، فرمول زیر توسط لیما (۲۰۰۶) است: ، که در آن .[۱۰]
- فرمولهای «زاویه بسیار بزرگ»، یعنی آنهایی که دوره دقیق را به صورت مجانبی برای دامنههای نزدیک به رادیان تقریب میزنند، با خطایی که برای دامنههای کوچکتر به صورت یکنواخت افزایش مییابد (یعنی برای دامنههای کوچک نامناسب هستند). یکی از بهترین این فرمولها، فرمول کرومر (Cromer) است:[۱۱] .




البته، افزایش با دامنه زمانی که باشد آشکارتر است، همانطور که در آزمایشهای بسیاری با استفاده از میله صلب یا دیسک مشاهده شده است.[۱۲] از آنجا که زمانسنجها و حسگرهای دقیق در حال حاضر حتی در آزمایشگاههای فیزیک مقدماتی موجود هستند، خطاهای تجربی یافت شده در آزمایشهای «زاویه بسیار بزرگ» به اندازه کافی کوچک هستند که با دوره دقیق مقایسه شوند، و توافق بسیار خوبی بین تئوری و آزمایشهایی که در آن اصطکاک ناچیز است، یافت شده است. از آنجا که این فعالیت توسط بسیاری از مربیان تشویق شده است، جستجو برای یک فرمول تقریبی ساده برای دوره تناوب آونگ که برای تمام دامنههای ممکن معتبر باشد و بتوان دادههای تجربی را با آن مقایسه کرد، انجام شد. در سال ۲۰۰۸، لیما یک فرمول میانگین وزنی با این ویژگی استخراج کرد:[۹] که در آن است، که حداکثر خطای تنها ۰٫۶٪ (در ) را نشان میدهد.




جابجایی زاویهای با دامنه دلخواه
بسط سری فوریه برای به صورت زیر داده میشود:[۱۳][۱۴]


که در آن نوم بیضوی (elliptic nome) است، و بسامد زاویهای است.



اگر تعریف کنیم: را میتوان با استفاده از بسط زیر تقریب زد: (ببینید (دنباله A002103 در OEIS)). توجه داشته باشید که برای است، بنابراین این تقریب حتی برای دامنههای بزرگ نیز قابل استفاده است. به طور معادل، زاویه را میتوان بر حسب تابع بیضوی ژاکوبی با مدول بیان کرد:[۱۵]







برای کوچک، داریم ، و ، بنابراین راه حل به خوبی توسط راه حل ارائه شده در بخش «تقریب زاویه کوچک» تخمین زده میشود.




مثالها
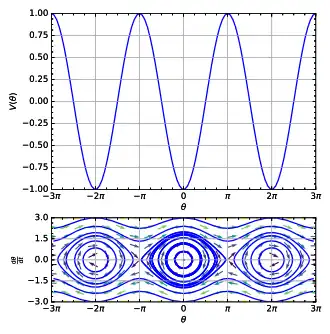
انیمیشنهای زیر حرکت یک آونگ ساده (بدون اصطکاک) را با مقادیر فزاینده جابجایی اولیه وزنه، یا به طور معادل سرعت اولیه فزاینده، نشان میدهند. نمودار کوچک بالای هر آونگ، نمودار صفحه فاز مربوطه است؛ محور افقی جابجایی و محور عمودی سرعت است. با سرعت اولیه به اندازه کافی زیاد، آونگ دیگر به عقب و جلو نوسان نمیکند بلکه به طور کامل دور نقطه اتکا میچرخد.
 زاویه اولیه ۰ درجه، تعادل پایدار
زاویه اولیه ۰ درجه، تعادل پایدار زاویه اولیه ۴۵ درجه
زاویه اولیه ۴۵ درجه زاویه اولیه ۹۰ درجه
زاویه اولیه ۹۰ درجه زاویه اولیه ۱۳۵ درجه
زاویه اولیه ۱۳۵ درجه زاویه اولیه ۱۷۰ درجه
زاویه اولیه ۱۷۰ درجه زاویه اولیه ۱۸۰ درجه، تعادل ناپایدار
زاویه اولیه ۱۸۰ درجه، تعادل ناپایدار آونگ با انرژی که به سختی برای یک چرخش کامل کافی است
آونگ با انرژی که به سختی برای یک چرخش کامل کافی است آونگ با انرژی کافی برای یک چرخش کامل
آونگ با انرژی کافی برای یک چرخش کامل
آونگ مرکب
یک آونگ مرکب (یا آونگ فیزیکی) آونگی است که در آن میله بدون جرم نیست و ممکن است دارای ابعاد گسترده باشد؛ یعنی یک جسم صلب با شکل دلخواه که حول یک نقطه اتکا نوسان میکند. در این حالت دوره تناوب آونگ به گشتاور لختی آن حول نقطه اتکا بستگی دارد.


معادله گشتاور بیان میکند: که در آن:

- شتاب زاویهای است.
- گشتاور نیرو است.


گشتاور توسط نیروی گرانش ایجاد میشود، بنابراین: که در آن:

- جرم کل جسم صلب (میله و وزنه) است.
- فاصله نقطه اتکا تا مرکز جرم سیستم است.
- زاویه نسبت به خط عمود است.



بنابراین، تحت تقریب زاویه کوچک، (یا به طور معادل زمانی که )، که در آن گشتاور لختی جسم حول نقطه اتکا است.



عبارت برای همان فرم آونگ ساده معمولی را دارد و دوره تناوبی برابر با مقدار زیر میدهد:[۲]

و بسامدی برابر با:

اگر زاویه اولیه در نظر گرفته شود (برای دامنههای بزرگ)، آنگاه عبارت برای تبدیل میشود به: و دوره تناوبی برابر با مقدار زیر میدهد: که در آن حداکثر زاویه نوسان (نسبت به خط عمود) و انتگرال بیضوی کامل نوع اول است.




یک مفهوم مهم طول معادل، است، که طول یک آونگ ساده است که همان بسامد زاویهای آونگ مرکب را دارد:



موارد زیر را در نظر بگیرید:
- آونگ ساده حالت خاصی است که در آن تمام جرم در وزنه متمرکز شده و در فاصله از نقطه اتکا نوسان میکند. بنابراین، و است، پس عبارت کاهش مییابد به: . توجه کنید که ، همانطور که انتظار میرفت (تعریف طول معادل).
- یک میله همگن با جرم و طول که از انتهای خود آویزان است دارای و است، بنابراین عبارت کاهش مییابد به: . توجه کنید که ؛ یک میله همگن طوری نوسان میکند که گویی یک آونگ ساده با طولی برابر با دو سوم طول خودش است.
- یک آونگ ساده سنگین: ترکیبی از یک میله همگن با جرم و طول که از انتهای خود آویزان است و یک وزنه در انتهای دیگر. در این حالت سیستم دارای جرم کل است و سایر پارامترها عبارتند از (طبق تعریف مرکز جرم) و ، بنابراین عبارت کاهش مییابد به:














که در آن . توجه کنید که این فرمولها را میتوان تنها با در نظر گرفتن جرم میله یا وزنه به عنوان صفر، به دو مورد قبلی تعمیم داد. همچنین توجه کنید که فرمول به جرم وزنه و میله به طور جداگانه بستگی ندارد، بلکه به نسبت آنها، بستگی دارد. یک تقریب میتواند برای ساخته شود:





توجه کنید که این چقدر شبیه به بسامد زاویهای در یک سیستم فنر-جرم با جرم مؤثر است.
آونگ میرا و واداشته
بحث بالا فقط بر روی وزنه آونگی تمرکز داشت که تنها تحت تأثیر نیروی گرانش بود. فرض کنید یک نیروی میرایی (استهلاک)، مثلاً مقاومت هوا، و همچنین یک نیروی محرک (رانش) سینوسی بر جسم وارد شود. این سیستم یک نوسانگر هماهنگ میرا و واداشته (Driven) است و رفتاری آشوبناک دارد.
معادله (۱) میتواند به صورت زیر نوشته شود:

(به اثبات گشتاور برای معادله (۱) در بالا مراجعه کنید).
یک جمله میرایی (استهلاک) و یک جمله نیروی محرک (رانش) میتوانند به سمت راست اضافه شوند تا رابطه زیر به دست آید:

که در آن فرض شده است میرایی مستقیماً متناسب با سرعت زاویهای است (این فرض برای مقاومت هوا با سرعت پایین صحیح است، همچنین ببینید نیروی پسار). و ثابتهایی هستند که به ترتیب دامنه نیروی محرک و درجه میرایی را تعیین میکنند. بسامد زاویهای نوسانات محرک است.



با تقسیم طرفین بر داریم:


برای یک آونگ فیزیکی (مرکب):

این معادله رفتار آشوبناک از خود نشان میدهد. حرکت دقیق این آونگ تنها به صورت عددی قابل یافتن است و به شدت به شرایط اولیه وابسته است، به عنوان مثال سرعت اولیه و دامنه شروع. با این حال، تقریب زاویه کوچک که در بالا ذکر شد، همچنان میتواند تحت شرایط لازم برای ارائه یک راه حل تحلیلی تقریبی استفاده شود.
تعبیر فیزیکی دوره تناوب موهومی
تابع بیضوی ژاکوبی که موقعیت یک آونگ را به عنوان تابعی از زمان بیان میکند، یک تابع دوچندان متناوب با یک دوره تناوب حقیقی و یک دوره تناوب موهومی است. دوره تناوب حقیقی، طبیعتاً زمانی است که طول میکشد تا آونگ یک چرخه کامل را طی کند. پل اپل یک تعبیر فیزیکی برای دوره تناوب موهومی ارائه کرد:[۱۶] اگر θ0 حداکثر زاویه یک آونگ باشد و ۱۸۰° − θ0 حداکثر زاویه آونگ دیگر، آنگاه دوره تناوب حقیقی هر یک، برابر با بزرگی دوره تناوب موهومی دیگری است.
آونگهای جفتسده
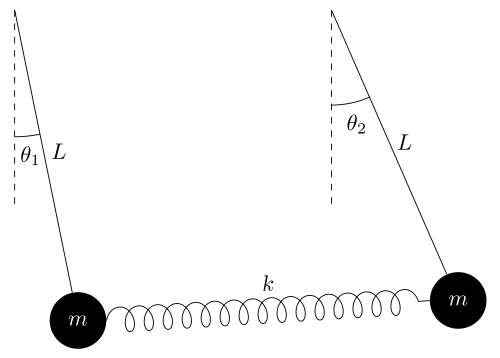
آونگهای جفتشده میتوانند بر حرکت یکدیگر تأثیر بگذارند، چه از طریق اتصال مستقیم (مانند فنری که وزنهها را به هم متصل میکند) و چه از طریق حرکات در ساختار تکیهگاه (مانند سطح میز). معادلات حرکت برای دو آونگ ساده یکسان که توسط یک فنر متصل به وزنهها جفت شدهاند، با استفاده از مکانیک لاگرانژی قابل استخراج است.
انرژی جنبشی سیستم عبارت است از: که در آن جرم وزنهها، طول ریسمانها و ، جابجاییهای زاویهای دو وزنه از وضعیت تعادل هستند.




انرژی پتانسیل سیستم عبارت است از:

که در آن شتاب گرانشی و ثابت فنر است. جابجایی فنر از موقعیت تعادل خود، با فرض تقریب زاویه کوچک در نظر گرفته شده است.


لاگرانژی سیستم به صورت زیر خواهد بود: که منجر به مجموعه معادلات دیفرانسیل جفتشده زیر میشود:


با جمع و تفریق این دو معادله و اعمال تقریب زاویه کوچک، دو معادله نوسانگر هماهنگ بر حسب متغیرهای و به دست میآید: که پاسخهای متناظر آنها عبارتند از: که در آن:





و ، ، ، ثابتهای انتگرالگیری هستند.



با بازنویسی راه حلها تنها بر حسب و داریم:

اگر به وزنهها ضربه (فشار) اولیه وارد نشود، شرط ایجاب میکند که باشد، که (پس از کمی جابجایی) نتیجه میدهد:



جستارهای وابسته
پانویس
- ↑ تعریف شده توسط کریستیان هویگنس: Huygens, Christian (1673). "Horologium Oscillatorium" (PDF). 17centurymaths. 17thcenturymaths.com. Retrieved 2009-03-01.، بخش ۴، تعریف ۳، ترجمه ژوئیه ۲۰۰۷ توسط یان بروس
- 1 2 Nave, Carl R. (2006). "Simple pendulum". Hyperphysics. Georgia State Univ. Retrieved 2008-12-10.
- ↑ Xue, Linwei (2007). "Pendulum Systems". Seeing and Touching Structural Concepts. Civil Engineering Dept., Univ. of Manchester, UK. Retrieved 2008-12-10.
- ↑ Weisstein, Eric W. (2007). "Simple Pendulum". Eric Weisstein's world of science. Wolfram Research. Retrieved 2009-03-09.
- ↑ Nelson؛ Olsson (فوریه ۱۹۸۶). «The pendulum — Rich physics from a simple system». American Journal of Physics. ۵۴ (۲): ۱۱۲–۱۲۱. doi:10.1119/1.14703. بیبکد:1986AmJPh..54..112N.
- 1 2 3 Carvalhaes، Claudio G.؛ Suppes، Patrick (دسامبر ۲۰۰۸). «Approximations for the period of the simple pendulum based on the arithmetic-geometric mean» (PDF). Am. J. Phys. ۷۶ (۱۲͒): ۱۱۵۰–۱۱۵۴. doi:10.1119/1.2968864. بیبکد:2008AmJPh..76.1150C. شاپا 0002-9505. دریافتشده در ۲۰۱۳-۱۲-۱۴.
- ↑ Borwein، J.M.؛ Borwein، P.B. (۱۹۸۷). Pi and the AGM. New York: Wiley. صص. ۱–۱۵. MR 0877728. شابک ۰-۴۷۱-۸۳۱۳۸-۷.
- ↑ Van Baak، Tom (نوامبر ۲۰۱۳). «A New and Wonderful Pendulum Period Equation» (PDF). Horological Science Newsletter. ۲۰۱۳ (۵): ۲۲–۳۰.
- 1 2 Lima، F. M. S. (۲۰۰۸-۰۹-۱۰). «Simple 'log formulae' for pendulum motion valid for any amplitude». European Journal of Physics. ۲۹ (۵): ۱۰۹۱–۱۰۹۸. doi:10.1088/0143-0807/29/5/021. شاپا 0143-0807 – به واسطهٔ IoP journals.
- ↑ Lima، F. M. S.؛ Arun، P. (اکتبر ۲۰۰۶). «An accurate formula for the period of a simple pendulum oscillating beyond the small angle regime». American Journal of Physics. ۷۴ (۱۰): ۸۹۲–۸۹۵. arXiv:physics/0510206. doi:10.1119/1.2215616. بیبکد:2006AmJPh..74..892L. شاپا 0002-9505.
- ↑ Cromer، Alan (فوریه ۱۹۹۵). «Many oscillations of a rigid rod». American Journal of Physics. ۶۳ (۲): ۱۱۲–۱۲۱. doi:10.1119/1.17966. بیبکد:1995AmJPh..63..112C. شاپا 0002-9505.
- ↑ Gil، Salvador؛ Legarreta، Andrés E.؛ Di Gregorio، Daniel E. (سپتامبر ۲۰۰۸). «Measuring anharmonicity in a large amplitude pendulum». American Journal of Physics. ۷۶ (۹): ۸۴۳–۸۴۷. doi:10.1119/1.2908184. بیبکد:2008AmJPh..76..843G. شاپا 0002-9505.
- ↑ Lawden، Derek F. (۱۹۸۹). Elliptic Functions and Applications. Springer-Verlag. ص. ۴۰. شابک ۰-۳۸۷-۹۶۹۶۵-۹. Eq. 2.7.9:
- ↑ Olver, Frank W. J.; Lozier, Daniel M.; Boisvert, Ronald F.; Clark, Charles W., eds. (2010), "آونگ (مکانیک)", NIST Handbook of Mathematical Functions, Cambridge University Press, ISBN 978-0521192255, MR2723248
- ↑ «A Complete Solution to the Non-Linear Pendulum». ۴ دسامبر ۲۰۲۱.
- ↑ Appell, Paul (July 1878). "Sur une interprétation des valeurs imaginaires du temps en Mécanique" [On an interpretation of imaginary time values in mechanics]. Comptes Rendus Hebdomadaires des Séances de l'Académie des Sciences. 87 (1).

برای مطالعه بیشتر
- Baker, Gregory L.; Blackburn, James A. (2005). The Pendulum: A Physics Case Study (PDF). Oxford University Press.
- Ochs, Karlheinz (2011). "A comprehensive analytical solution of the nonlinear pendulum". European Journal of Physics. 32 (2): 479–490. Bibcode:2011EJPh...32..479O. doi:10.1088/0143-0807/32/2/019. S2CID 53621685.
- Sala, Kenneth L. (1989). "Transformations of the Jacobian Amplitude Function and its Calculation via the Arithmetic-Geometric Mean". SIAM J. Math. Anal. 20 (6): 1514–1528. doi:10.1137/0520100.