رباتیک زیستی
رباتیک زیستی یا بیورباتیک (به انگلیسی: Biorobotics) یک دانش میانرشتهای است که حوزههای مهندسی پزشکی، سایبرنتیک و رباتیک را در هم میآمیزد تا فناوریهای تازهای برای پیوند زیستشناسی با سامانههای مکانیکی پدیدآورد، ارتباطات کارآمدتر بسازد، اطلاعات ژنتیکی را تغییر دهد و ماشینهایی ایجاد کند که از سامانههای زیستی تقلید میکنند.[۱][۲]
سایبرنتیک
سایبرنتیک بر ارتباطات و سامانههای موجودات زنده و ماشینها تمرکز دارد که میتواند در کنار حوزههای گوناگون همچون زیستشناسی، ریاضیات، علوم رایانه، مهندسی و بسیاری رشتههای دیگر بهکار گرفته شود.
این رشته بخشی از رباتیک زیستی بهشمار میرود زیرا بدنههای زیستی و سامانههای مکانیکی را همزمان بررسی میکند. مطالعه این دو سامانه امکان تحلیل پیشرفته کارکردها و فرآیندهای هر یک و همچنین تعامل میان آنها را فراهم میسازد.
تاریخچه
نظریه سایبرنتیک مفهومی است که ریشههای آن به سدهها پیش بازمیگردد. افلاطون این اصطلاح را برای اشاره به «اداره مردم» بهکار برد. واژه cybernetique در میانه سده نوزدهم توسط فیزیکدان آندره-ماری آمپر استفاده شد.[۳] اصطلاح cybernetics در اواخر دهه ۱۹۴۰ رایج شد تا به رشتهای اشاره کند که با مهندسی برق، ریاضیات و زیستشناسی تماس داشت اما از آنها متمایز بود.[۳]
علم
سایبرنتیک بهسبب گستردگی رشتههایی که در بر میگیرد اغلب نادرست فهمیده میشود. در اوایل سده بیستم بهعنوان حوزهای میانرشتهای نامگذاری شد که زیستشناسی، علوم، نظریه شبکه و مهندسی را ترکیب میکرد. امروزه همه حوزههای علمی مرتبط با فرایندهای سامانهای را پوشش میدهد. هدف سایبرنتیک تحلیل سامانهها و فرایندهای هر سامانه یا چند سامانه برای کارآمدتر و مؤثرتر کردن آنها است.[۳]
کاربردها
سایبرنتیک یک اصطلاح چتری است و به همین دلیل کاربردهای آن به همه علوم سامانهمحور مانند زیستشناسی، ریاضیات، علوم رایانه، مهندسی، مدیریت، روانشناسی، جامعهشناسی، هنر و بیشتر گسترش مییابد. سایبرنتیک در رشتههای گوناگون برای کشف اصول سامانهها، سازگاری جانداران، تحلیل اطلاعات و موارد دیگر استفاده میشود.[۴]
مهندسی ژنتیک
مهندسی ژنتیک شاخهای است که با بهرهگیری از فناوریهای نوین به دستکاری موجودات زیستی میپردازد. دانشمندان از طریق روشهای گوناگون میتوانند ماده ژنتیکی میکروارگانیسمها، گیاهان و جانوران را تغییر دهند تا ویژگیهای مطلوبی به آنها بدهند، برای نمونه گیاهان را بزرگتر، بهتر و سریعتر رشد دهند.[۵] مهندسی ژنتیک بخشی از رباتیک زیستی بهشمار میآید زیرا از فناوریهای نوین برای تغییر زیستشناسی و دستکاری دیانای جانداران برای سود فردی و اجتماعی بهره میبرد.[۶][۷]
تاریخچه
گرچه انسانها هزاران سال است که با گزینش مصنوعی ژنهای جانوران و گیاهان را تغییر دادهاند (مانند جهشهای ژنتیکی که تئوسینته را به ذرت و گرگ را به سگ دگرگون کرد)، اصطلاح «مهندسی ژنتیک» به تغییر یا درج هدفمند ژنهای ویژه در دیانای یک جاندار اشاره دارد. نخستین مورد موفقیتآمیز مهندسی ژنتیک در سال ۱۹۷۳ رخ داد، زمانی که هربرت بویر و استانلی کوهن توانستند ژنی با مقاومت آنتیبیوتیکی را به یک باکتری منتقل کنند.[۸][۹][۱۰]
علم
سه فن اصلی در مهندسی ژنتیک بهکار میرود: روش پلاسمیدی، روش ناقلی و روش بیولیستیک.
روش پلاسمیدی
این روش بیشتر برای میکروارگانیسمهایی مانند باکتریها بهکار میرود. در این روش، مولکولهای دیانای به نام پلاسمیدها از باکتری جدا شده و در آزمایشگاه توسط آنزیمهای برشی شکسته میشوند. هنگام شکستن، لبههایی پدید میآید که پُرچسب خوانده میشود و توانایی پیوند دوباره دارد. این مولکولهای پُرچسب به باکتری دیگری منتقل میشوند و در آنجا به حلقههای دیانای با ماده ژنتیکی تغییر یافته متصل میگردند.[۱۱]
روش ناقلی
روش ناقلی دقیقتر از روش پلاسمیدی دانسته میشود زیرا شامل انتقال یک ژن مشخص بهجای یک توالی کامل است. در این روش، ژن مشخصی از یک رشته دیانای در آزمایشگاه با کمک آنزیمهای برشی جدا و در یک ناقل درج میشود. پس از پذیرش رمز ژنتیکی توسط ناقل، آن به درون یاخته میزبان وارد میشود و دیانای انتقال مییابد.[۱۱]
روش زیستپرتابهای
روش زیستپَرتابهای (بیولیستیک) یا تفنگ ژنی معمولاً برای تغییر ماده ژنتیکی گیاهان بهکار میرود. در این روش، دیانای مورد نظر با ذرهای فلزی مانند طلا یا تنگستن درون تفنگی پرسرعت جاسازی میشود. سپس ذره به درون گیاه شلیک میشود. بهدلیل سرعتهای بسیار بالا و خلأ ایجادشده هنگام شلیک، ذره میتواند از دیواره یاخته عبور کند و دیانای تازه را وارد یاخته کند.[۱۲]
کاربردها
مهندسی ژنتیک در حوزههای پزشکی، پژوهش و کشاورزی کاربردهای فراوانی دارد. در پزشکی، باکتریهای دستکاریشده ژنتیکی برای تولید داروهایی همچون انسولین، هورمون رشد انسانی و واکسنها بهکار میروند. در پژوهش، دانشمندان جانداران را بهطور ژنتیکی تغییر میدهند تا تغییرات جسمی و رفتاری آنها را مشاهده کرده و نقش ژنهای مشخص را دریابند. در کشاورزی، مهندسی ژنتیک بسیار اهمیت دارد زیرا کشاورزان از آن برای پرورش محصولات مقاوم در برابر علفکشها و آفتهایی مانند ذرت بیتی استفاده میکنند.[۱۳][۱۴]
بیونیک
بیونیک شاخهای از مهندسی پزشکی و بخشی از رباتیک زیستی است که از سامانههای الکتریکی و مکانیکی تشکیل شده و سامانههای زیستی را تقلید میکنند، مانند پروتزها و سمعکها. این واژه یک تکواژ چندوجهی است که زیستشناسی و الکترونیک را در هم میآمیزد.
تاریخچه
پیشینه بیونیک به مصر باستان بازمیگردد. در پای یک مومیایی، یک انگشت پای مصنوعی از چوب و چرم پیدا شد. دوره این مومیایی حدود سده پانزدهم پیش از میلاد برآورد شده است. بیونیک در یونان و روم باستان نیز دیده میشود؛ برای سربازان قطععضو شده، پاها و بازوهای مصنوعی ساخته میشد. در اوایل سده شانزدهم، جراح نظامی فرانسوی به نام آمبروز پاره پیشگام این حوزه شد و انواع پروتزهای اندام بالایی و پایینی را ساخت. یکی از معروفترین پروتزهای او «Le Petit Lorrain» بود، یک دست مکانیکی که با ضامنها و فنرها کار میکرد. در اوایل سده نوزدهم، آلساندرو ولتا گامهای بیشتری در بیونیک برداشت. او پایهگذار ساخت سمعک شد و نشان داد تحریک الکتریکی میتواند با کاشت یک ایمپلنت الکتریکی در عصب کیسهای گوش بیمار، شنوایی را بازگرداند. در سال ۱۹۴۵، آکادمی ملی علوم آمریکا «برنامه اندام مصنوعی» را راهاندازی کرد که تمرکز آن بر بهبود پروتزها بود، زیرا شمار زیادی از سربازان جنگ جهانی دوم قطععضو شده بودند. از آن زمان تاکنون، مواد پروتزی، روشهای طراحی رایانهای و فنون جراحی پیشرفت کرده و بیونیک امروزی را ساختهاند.[۱۵]
علم
پروتزها
اجزای اصلی پروتزهای امروزی شامل پایلون، سوکت و سامانه تعلیق هستند. پایلون چارچوب داخلی پروتز است که از میلههای فلزی یا ترکیبهای فیبرکربن ساخته میشود. سوکت بخشی از پروتز است که آن را به اندام از دسترفته فرد متصل میکند. سوکت دارای یک لایه نرم درونی است که باعث راحتی اتصال میشود و در عین حال محکم میماند. سامانه تعلیق برای نگهداشتن پروتز بر اندام اهمیت دارد و معمولاً شامل تسمهها، کمربندها یا آستینهایی است که اندام را در جای خود نگه میدارند.
عملکرد پروتز میتواند به روشهای گوناگون طراحی شود. پروتز ممکن است مکانیکی-بدنی، برونیقدرت یا میوالکتریکی باشد. پروتزهای مکانیکی-بدنی شامل کابلهایی هستند که به یک بند یا مهار متصلاند و روی شانه سالم فرد قرار میگیرند و امکان کنترل پروتز را فراهم میکنند. پروتزهای برونیقدرت شامل موتورهایی برای حرکت و دکمهها و کلیدهایی برای کنترل هستند. پروتزهای میوالکتریکی شکل پیشرفتهتری از پروتزها هستند که در آن الکترودها روی ماهیچههای بالای اندام قرار میگیرند. الکترودها انقباض ماهیچهها را شناسایی کرده و سیگنالهای الکتریکی به پروتز میفرستند تا حرکت کند. نقطهضعف این نوع پروتز آن است که اگر حسگرها درست روی اندام قرار نگیرند، پیامهای الکتریکی قادر به حرکت دادن پروتز نخواهند بود.[۱۶] «TrueLimb» نام یک برند خاص پروتز است که از حسگرهای میوالکتریکی استفاده میکند و به فرد امکان کنترل اندام بیونیک خود را میدهد.[۱۶]
سمعکها
چهار بخش اصلی سمعک عبارتاند از میکروفون، تقویتکننده، گیرنده و باتری. میکروفون صداهای بیرونی را دریافت کرده، آنها را به سیگنالهای الکتریکی تبدیل و به تقویتکننده میفرستد. تقویتکننده صدا را افزایش داده و آن را به گیرنده منتقل میکند. گیرنده سیگنال الکتریکی را دوباره به صدا تبدیل کرده و آن را به گوش میفرستد. سلول مویی در گوش ارتعاشات صدا را دریافت کرده، آنها را به پیامهای عصبی تبدیل میکند و به مغز میفرستد تا صداها برای فرد قابل درک شوند. باتری نیز وظیفه تأمین انرژی سمعک را بر عهده دارد.[۱۷]
کاربردها
کاشت حلزون
کاشتهای حلزونی گونهای از سمعک برای ناشنوایان هستند. کاشتهای حلزونی سیگنالهای الکتریکی را مستقیماً به عصب شنوایی، یعنی عصبی که مسئول پیامهای صوتی است، میفرستند، نه صرفاً به مجرای گوش مانند سمعکهای معمولی.
سمعکهای استخوانمحور
این سمعکها نیز برای افرادی با کاهش شنوایی شدید بهکار میروند. آنها به استخوانهای گوش میانی متصل میشوند تا ارتعاشهای صوتی را در جمجمه ایجاد کنند و این ارتعاشها را به حلزون گوش بفرستند.
پوست حسی مصنوعی
پوست حسی مصنوعی هرگونه فشاری که بر آن وارد شود را شناسایی میکند و برای افرادی طراحی شده است که حس لامسه را در بخشهایی از بدن خود از دست دادهاند، مانند بیماران دیابتی با نوروپاتی محیطی.
چشم بیونیک
چشم بیونیک یک کاشت زیستالکترونیکی است که برای بازگرداندن بینایی در افراد نابینا طراحی شده است.
اگرچه این فناوری هنوز در حال توسعه است، اما توانسته به برخی افراد نابینای قانونی کمک کند تا دوباره حروف را تشخیص دهند.[۱۸]
بازآفرینی شبکیه، که شامل میلیونها سلول گیرنده نور است، و انطباق با تواناییهای استثنایی عدسی و دامنه پویای چشم انسان چالشهای بزرگی را پدیدمیآورد. ادغام عصبی نیز این فرایند را پیچیدهتر میکند. با وجود این دشواریها، پژوهشها و نمونهسازیهای مداوم در سالهای اخیر به دستاوردهای بزرگی منجر شدهاند.[۱۸]
بیونیک ارتوپدی
بیونیک ارتوپدی شامل اندامهای بیونیک پیشرفتهای است که از دستگاه عصبماهیچهای فرد برای کنترل اندام بیونیک استفاده میکنند. پیشرفت تازه در درک کارکرد مغز به توسعه و اجرای واسط مغز و رایانه (BMI) منجر شده است.[۱۹] بیامآیها امکان پردازش پیامهای عصبی میان نواحی حرکتی مغز و ماهیچههای یک اندام خاص برای آغاز حرکت را فراهم میکنند.[۱۹] آنها سهم بزرگی در بازگرداندن توان حرکت مستقل افراد دارای اندام بیونیک یا اسکلت بیرونی دارند.[۱۹]
رباتیک آندوسکوپیک
این رباتها میتوانند در طول کولونوسکوپی یک پولیپ را بردارند.
رباتهای زیستدورگه
رباتهای زیستدورگه رباتهای مکانیکی هستند که در آنها اجزای زیستی بهکار گرفته شده است.[۲۰] برای نمونه، یک پهپاد که حسگر زیستی بویایی دارد و از شاخک یک کرم ابریشم نر استفاده میکند و میتواند برای مکانیابی منبع بو بهکار رود.[۲۱]
تعاملهای حیوان-ربات
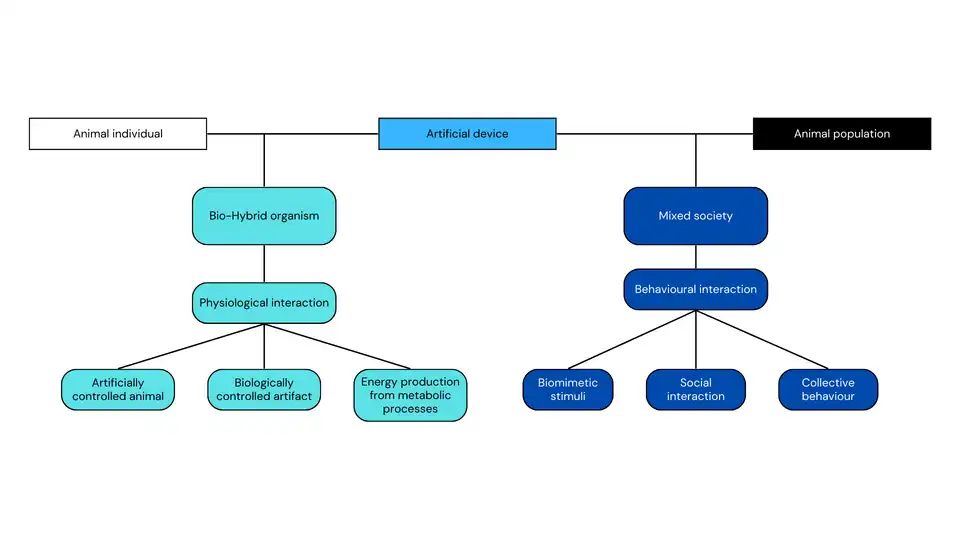
تعاملهای حیوان-ربات شاخهای از رباتیک زیستی است که بر ترکیب سازههای رباتیک با جانوران منفرد یا جمعیتهای جانوری تمرکز دارد.[۲۲] این حوزه به دو شاخه اصلی تقسیم میشود: یکی مرتبط با دستگاههای مکانیکی-الکترونیکی و جانوران منفرد و دیگری مربوط به جمعیتهای جانوری. هر دو شاخه کاربردهای متنوعی دارند، از سایبورگهای جانوری که از تواناییهای حرکتی برتر جانوران بهره میبرند[۲۳] تا مطالعات رفتارشناسی پیرامون رفتار جمعی جانوران.[۲۴][۲۵][۲۶]
در حالی که این تقسیمبندی تصویری کلی و درست از حوزه ارائه میدهد، برخی تعاملهای حیوان-ربات بهطور دقیق در هیچیک از این دو شاخه نمیگنجند یا ترکیبی از هر دو هستند. این موضوع بهویژه دربارهٔ رباتهای رفتارشناختی صدق میکند که بهصورت یکبهیک تعامل میکنند[۲۵][۲۷] یا زمانی که جانوران فرااجتماعی همچون یک ابرجاندار در تعامل با یک دستگاه رباتیک در نظر گرفته میشوند. در این حالت، اصطلاح «ابرجاندار زیستدورگه» برای توصیف ترکیب یک دستگاه رباتیک با یک ابرجاندار بهکار میرود تا امکان تعامل، کنترل و در نتیجه مطالعه آن ابرجاندار فراهم شود.[۲۸][۲۹][۳۰]
جوامع آمیخته
جوامع آمیخته ترکیبی از یک مجموعه جانوری (جامعه جانوری) با یک مجموعه از دستگاههای رباتیک (جامعه مصنوعی) هستند. باید در بهکارگیری واژه «جامعه» دقت شود، زیرا این اسم میتواند برای زیستشناسانی که در این حوزه فعالیت میکنند گمراهکننده باشد؛ واژه دقیقتر «جمعیت» است،[۲۲] که در ادامه این بخش نیز از همین واژه استفاده شده است.
معمولاً جمعیت رباتیک از نمونههای رباتیک جانوران هدف تشکیل میشود که هدف از آنها ادغام در جمعیت جانوری است. برای این منظور، محرکهایی که بهطور طبیعی توسط جانوران دریافت میشوند، از سوی رباتها فرستاده میشوند، از جمله نشانههای دیداری، تپشهای حرارتی، سیگنالهای ارتعاشی و غیره. میزان موفقیت رباتها درآمیختن با جمعیت جانوری بهعنوان «زیستپذیری» شناخته میشود و اغلب برای امکان مطالعه بیشتر رفتار گونه هدف، نقشی کلیدی دارد.[۳۱]
زمانی که تعامل میان جمعیت جانوری و جمعیت رباتیک از طریق ایجاد کانالهای ارتباطی مناسب برقرار شود، جوامع آمیخته این امکان را فراهم میکنند که رفتارهای رباتیک سازگار با بازخوردهای آنی از جمعیت جانوری شکل گیرد. با پاسخ مستقیم به رفتار جانوران، رباتها میتوانند بهطور پویا کنشهای خود را تنظیم کنند تا بهتر در گروه ادغام شوند. این توانایی بهویژه برای درک رفتارهای جمعی در جمعیتهای جانوری ارزشمند است. رباتهای سازگار میتوانند برای بازآفرینی نقشها یا تعاملهای مشخص در یک گروه بهکار روند و امکان آزمون فرضیههایی دربارهٔ هماهنگی، تصمیمگیری یا سازمان اجتماعی را فراهم کنند. این رویکرد میان روشهای آزمایشی و مدلسازی پیوند برقرار میکند تا بینشی در مورد سازوکارهای زیربنایی رفتار جمعی ارائه دهد.[۳۲]
جستارهای وابسته
پانویس
- ↑ Dario, Paolo (2005). "Biorobotics". Journal of the Robotics Society of Japan. 23 (5): 552–554. doi:10.7210/jrsj.23.552.
- ↑ مشارکتکنندگان ویکیپدیا. «Biorobotics». در دانشنامهٔ ویکیپدیای انگلیسی.
- 1 2 3 ["Cybernetics) – A Definition". pangaro.com. Retrieved 2020-04-03.
{{cite web}}: Check|url=value (help) - ↑ ["Cybernetics) - Encyclopedia of Mathematics". encyclopediaofmath.org. Retrieved 2020-04-03.
{{cite web}}: Check|url=value (help) - ↑ Turner, Lisa (June 2001). [(https://search.ebscohost.com/login.aspx?direct=true&db=aph&AN=106979152&site=ehost-live&scope=site). "Weird science: what you need to know about genetic engineering"]. library.brookdalecc.edu. Retrieved 2023-04-24.
{{cite web}}: Check|url=value (help) - ↑ ["What) is genetic engineering?". yourgenome. Retrieved 2025-03-25.
{{cite web}}: Check|url=value (help) - ↑ Mulligan, Pamela K. (2021). [doi(https://www.accessscience.com/content/285000 "Genetic engineering"]. Access Science.
{{cite journal}}: Check|url=value (help); Unknown parameter|doi)=ignored (help) - ↑ Rangel, Gabriel (2015-08-09). ["From) Corgis to Corn: A Brief Look at the Long History of GMO Technology". Science in the News. Harvard University. Retrieved 2020-04-03.
{{cite web}}: Check|url=value (help) - ↑ ["History) of genetic engineering". Royal Society Te Apārangi. Retrieved 2020-04-03.
{{cite web}}: Check|url=value (help) - ↑ ["Genetic) Engineering". Genome.gov. Retrieved 2020-04-03.
{{cite web}}: Check|url=value (help) - 1 2 ["Methods) of Genetic Engineering". mrlloyder. Retrieved 2020-04-03.
{{cite web}}: Check|url=value (help) - ↑ Mathur, Jaideep; Griffiths, Sarah; Barton, Kiah; Schattat, Martin H. (2012). "Green-to-Red Photoconvertible mEosFP-Aided Live Imaging in Plants". Imaging and Spectroscopic Analysis of Living Cells - Optical and Spectroscopic Techniques. Methods in Enzymology. Vol. 504. pp. 163–181. doi:10.1016/B978-0-12-391857-4.00008-2. ISBN 978-0-12-391857-4. PMID 22264534.
In comparison to the agro-infilteration method, the method involving coating of gold or tungsten particles with DNA is cumbersome, involves a proprietary biolistic particle delivery system… and expensive consumables. The expression of mEosFP probes is usually assessed between 6 and 20 h after bombardment. This is a useful method if chlorophyll autofluorescence is a major impediment to observation since achlorophyllous cells such as those of the onion bulb epidermal layer can be used.
- ↑ ["7.23B): Applications of Genetic Engineering". Biology LibreTexts. 2017-06-06. Retrieved 2020-04-03.
{{cite web}}: Check|url=value (help) - ↑ ["genetic) engineering | Definition, Process, & Uses". Encyclopædia Britannica. Retrieved 2020-04-03.
{{cite web}}: Check|url=value (help) - ↑ ["The) History of Bionics". Bionic Medicine. 2012-12-10. Retrieved 2020-04-03.
{{cite web}}: Check|url=value (help) - 1 2 [(https://www.unlimitedtomorrow.com/how-are-prosthetic-arms-controlled/) "How Prosthetic Arms Are Controlled, and How TrueLimb is Different"]. Unlimited Tomorrow. 2021-08-04. Retrieved 2023-11-15.
{{cite web}}: Check|url=value (help) - ↑ ["Hearing) Aid Basics". HowStuffWorks. 2007-08-23. Retrieved 2020-04-03.
{{cite web}}: Check|url=value (help) - 1 2 Lu, Donna (August 2019). "Bionic eye helps people who are blind read letters again". New Scientist. 243 (3241): 15. Bibcode:2019NewSc.243...15L. doi:10.1016/S0262-4079(19)31410-1.
- 1 2 3 Pandarinath, Chethan; Bensmaia, Sliman J. (April 2022). "The science and engineering behind sensitized brain-controlled bionic hands". Physiological Reviews. 102 (2): 551–604. doi:10.1152/physrev.00034.2020. PMC 8742729. PMID 34541898.
- ↑ Peters, Samantha; Olender, Max (2025-02-04). [(https://www.darpa.mil/sites/default/files/attachment/2025-02/darpa-program-hybrids-webinar-presentation.pdf) "Hybridizing Biology and Robotics through Integration for Deployable Systems"]. دارپا. Retrieved 2025-02-26.
{{cite web}}: Check|url=value (help) - ↑ Fukui, Chihiro; Uchida, Tomoya; Koizumi, Sakito; Murayama, Yuta; Liu, Hao; Nakata, Toshiyuki; Terutsuki, Daigo (5 February 2025). "Advanced bio-hybrid drone for superior odor-source localization: high-precision and extended-range detection capabilities". npj Robotics. 3 (1). doi:10.1038/s44182-025-00020-9.
- 1 2 Romano, Donato; Donati, Elisa; Benelli, Giovanni; Stefanini, Cesare (June 2019). "A review on animal–robot interaction: from bio-hybrid organisms to mixed societies". Biological Cybernetics. 113 (3): 201–225. doi:10.1007/s00422-018-0787-5. PMID 30430234.
- ↑ Wang, Yueming; Lu, Minlong; Wu, Zhaohui; Tian, Liwen; Xu, Kedi; Zheng, Xiaoxiang; Pan, Gang (May 2015). "Visual Cue-Guided Rat Cyborg for Automatic Navigation [Research Frontier]". IEEE Computational Intelligence Magazine. 10 (2): 42–52. doi:10.1109/MCI.2015.2405318.
- ↑ Krause, Jens; Winfield, Alan F.T.; Deneubourg, Jean-Louis (July 2011). "Interactive robots in experimental biology". Trends in Ecology & Evolution. 26 (7): 369–375. Bibcode:2011TEcoE..26..369K. doi:10.1016/j.tree.2011.03.015. PMID 21496942.
- 1 2 Phamduy, P; Polverino, G; Fuller, R C; Porfiri, M (27 August 2014). "Fish and robot dancing together: bluefin killifish females respond differently to the courtship of a robot with varying color morphs". Bioinspiration & Biomimetics. 9 (3): 036021. Bibcode:2014BiBi....9c6021P. doi:10.1088/1748-3182/9/3/036021. PMID 25162832.
- ↑ Michelsen, Axel; Andersen, Bent Bach; Storm, Jesper; Kirchner, Wolfgang H.; Lindauer, Martin (April 1992). "How honeybees perceive communication dances, studied by means of a mechanical model". Behavioral Ecology and Sociobiology (به انگلیسی). 30 (3–4): 143–150. Bibcode:1992BEcoS..30..143M. doi:10.1007/BF00166696.
- ↑ Patricelli, Gail L.; Coleman, Seth W.; Borgia, Gerald (January 2006). "Male satin bowerbirds, Ptilonorhynchus violaceus, adjust their display intensity in response to female startling: an experiment with robotic females". Animal Behaviour. 71 (1): 49–59. doi:10.1016/j.anbehav.2005.03.029.
- ↑ Barmak, Rafael; Stefanec, Martin; Hofstadler, Daniel N.; Piotet, Louis; Schönwetter-Fuchs-Schistek, Stefan; Mondada, Francesco; Schmickl, Thomas; Mills, Rob (22 March 2023). "A robotic honeycomb for interaction with a honeybee colony". Science Robotics. 8 (76): eadd7385. doi:10.1126/scirobotics.add7385. PMID 36947600.
- ↑ Barmak, Rafael; Hofstadler, Daniel N.; Stefanec, Martin; Piotet, Louis; Cherfan, Raphaël; Schmickl; Thomas; Mondada, Francesco; Mills, Rob (2024). "Biohybrid Superorganisms—On the Design of a Robotic System for Thermal Interactions With Honeybee Colonies". IEEE Access. 12: 50849–50871. Bibcode:2024IEEEA..1250849B. doi:10.1109/ACCESS.2024.3385658.
- ↑ Botner Barmak, Rafael (2024). A Biohybrid Superorganism - Investigating honeybees' collective behaviors via interactive robotics (Thesis). Lausanne, EPFL. doi:10.5075/epfl-thesis-10594.
- ↑ Halloy, José; Mondada, Francesco; Kernbach, Serge; Schmickl, Thomas (2013). "Towards Bio-hybrid Systems Made of Social Animals and Robots". Biomimetic and Biohybrid Systems. Lecture Notes in Computer Science. Vol. 8064. pp. 384–386. doi:10.1007/978-3-642-39802-5_42. ISBN 978-3-642-39801-8.
- ↑ "Developmental Collective Robotics: Advantages and Challenges of Unbounded Self-Development". Handbook of Collective Robotics. 2013. pp. 529–570. doi:10.1201/b14908-19. ISBN 978-0-429-06759-4.