ماتریس تابع تبدیل
در نظریه سامانههای کنترل و شاخههای مختلف مهندسی، ماتریس تابع تبدیل (به انگلیسی: Transfer function matrix) یا به اختصار ماتریس تبدیل، تعمیمی از تابع تبدیل در سامانههای تکورودی تکخروجی (SISO) به سامانههای چندورودی چندخروجی (MIMO) است.[۱] این ماتریس، خروجیهای یک سامانه را به ورودیهای آن مرتبط میکند. این ساختار بهویژه برای سامانههای خطی تغییرناپذیر با زمان (LTI) مفید است، زیرا میتوان آن را بر حسب صفحه s بیان کرد.
در برخی سامانهها، بهویژه آنهایی که کاملاً از اجزای غیرفعال (Passive) تشکیل شدهاند، تشخیص اینکه کدام متغیرها ورودی و کدام خروجی هستند، میتواند مبهم باشد. در مهندسی برق، یک رویکرد رایج این است که تمام متغیرهای ولتاژ در یک طرف و تمام متغیرهای جریان در طرف دیگر جمعآوری شوند، صرفنظر از اینکه کدامیک ورودی یا خروجی است. این کار منجر به این میشود که تمام درایههای ماتریس تبدیل، واحد امپدانس الکتریکی داشته باشند. مفهوم امپدانس (و در نتیجه ماتریسهای امپدانس) از طریق قیاس به سایر حوزههای انرژی، بهویژه مکانیک و آکوستیک، نیز راه یافته است.
بسیاری از سامانههای کنترل، چندین حوزه انرژی مختلف را در بر میگیرند. این امر نیازمند ماتریسهای تبدیلی با درایههایی با واحدهای ترکیبی است. این ماتریسها هم برای توصیف مبدلهایی که بین حوزههای مختلف ارتباط برقرار میکنند و هم برای توصیف کل سامانه ضروری هستند. اگر قرار باشد ماتریس به درستی جریان انرژی را در سامانه مدلسازی کند، باید متغیرهای سازگار برای این کار انتخاب شوند.
کلیات
یک سامانه MIMO با m خروجی و n ورودی توسط یک ماتریس m × n نمایش داده میشود. هر درایه در این ماتریس به شکل یک تابع تبدیل است که یک خروجی را به یک ورودی مرتبط میکند. برای مثال، برای یک سامانه سهورودی و دوخروجی، میتوان نوشت:

که در آن un ورودیها، ym خروجیها و gmn توابع تبدیل هستند. این رابطه را میتوان به صورت خلاصهتر با نمادگذاری عملگر ماتریسی نوشت:

که در آن Y یک بردار ستونی از خروجیها، G یک ماتریس از توابع تبدیل و U یک بردار ستونی از ورودیها است.
در بسیاری از موارد، سامانه مورد نظر یک سامانه خطی تغییرناپذیر با زمان (LTI) است. در چنین مواردی، راحتتر است که ماتریس تبدیل بر حسب تبدیل لاپلاس (در مورد متغیرهای زمان پیوسته) یا تبدیل زد (در مورد متغیرهای زمان گسسته) بیان شود. این موضوع را میتوان به صورت زیر نشان داد:

این نمادگذاری نشان میدهد که متغیرها و ماتریس بر حسب s (متغیر فرکانس مختلط در صفحه s) تعریف شدهاند، نه زمان. فرض میشود تمام مثالهای این مقاله به این شکل هستند. برای سامانههای زمان گسسته، s با z از تبدیل زد جایگزین میشود، اما این تغییری در تحلیلهای بعدی ایجاد نمیکند. این ماتریس زمانی بسیار مفید است که یک ماتریس گویای سره باشد، یعنی تمام درایههای آن تابع گویای سره باشند. در این حالت، میتوان از نمایش فضای حالت استفاده کرد.[۲]
در مهندسی سامانهها، ماتریس تبدیل کلی سامانه G (s) به دو بخش تجزیه میشود: H (s) که نماینده سامانه تحت کنترل است و C(s) که نماینده سامانه کنترل است. ورودیهای C (s) شامل ورودیهای سامانه اصلی و خروجیهای H (s) است. خروجیهای C (s) نیز ورودیهای سامانه H (s) را تشکیل میدهند.[۳]
سامانههای الکتریکی
در سامانههای الکتریکی، اغلب تمایز بین متغیرهای ورودی و خروجی مبهم است. بسته به شرایط و دیدگاه، هر کدام میتوانند ورودی یا خروجی باشند. در چنین مواردی، مفهوم پورت (مکانی که انرژی از یک سامانه به سامانه دیگر منتقل میشود) میتواند مفیدتر از ورودی و خروجی باشد. مرسوم است که برای هر پورت (p)، دو متغیر تعریف شود: ولتاژ دو سر آن (Vp) و جریان ورودی به آن (Ip). برای مثال، ماتریس تبدیل یک شبکه دو جفتی را میتوان به صورت زیر تعریف کرد:

که در آن zmn، پارامترهای امپدانس یا پارامترهای-z نامیده میشوند. این نامگذاری به این دلیل است که این پارامترها واحد امپدانس الکتریکی دارند و جریانهای پورت را به ولتاژ پورت مرتبط میکنند. پارامترهای-z تنها راه تعریف ماتریس تبدیل برای شبکههای دو دهانه نیستند. شش ماتریس پایه وجود دارد که ولتاژها و جریانها را به هم مرتبط میکنند و هر کدام برای توپولوژیهای خاصی از شبکه مزایایی دارند.[۴] با این حال، تنها دو مورد از این ماتریسها را میتوان به تعداد دلخواه پورت تعمیم داد: پارامترهای-z و معکوس آن، یعنی پارامترهای ادمیتانس یا پارامترهای-y.[۵]
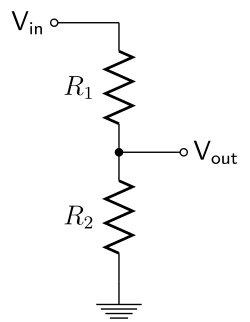
برای درک رابطه بین ولتاژها و جریانهای پورت با ورودیها و خروجیها، مدار ساده مقسم ولتاژ را در نظر بگیرید. اگر فقط بخواهیم ولتاژ خروجی (V2) ناشی از اعمال ولتاژ ورودی (V1) را در نظر بگیریم، تابع تبدیل به صورت زیر خواهد بود:

این را میتوان به عنوان حالت بدیهی یک ماتریس تبدیل ۱×۱ در نظر گرفت. این عبارت، ولتاژ خروجی را در صورتی که جریانی از پورت ۲ خارج نشود، به درستی پیشبینی میکند، اما با افزایش بار، دقت آن کاهش مییابد. اگر بخواهیم از این مدار به صورت معکوس استفاده کنیم (یعنی با اعمال ولتاژ به پورت ۲، ولتاژ پورت ۱ را محاسبه کنیم)، این عبارت حتی بدون بار در پورت ۱ نتیجه کاملاً اشتباهی میدهد. این رابطه ولتاژی بزرگتر از ولتاژ اعمالشده در پورت ۲ پیشبینی میکند که در یک مدار مقاومتی خالص غیرممکن است. برای پیشبینی صحیح رفتار مدار، باید جریانهای ورودی و خروجی پورتها را نیز در نظر گرفت، کاری که ماتریس تبدیل انجام میدهد.[۶] ماتریس امپدانس برای مدار تقسیمکننده ولتاژ به صورت زیر است:

این ماتریس رفتار مدار را در تمام شرایط ورودی و خروجی به طور کامل توصیف میکند.[۷]
در فرکانسهای مایکروویو، استفاده عملی از ماتریسهای تبدیل مبتنی بر ولتاژ و جریان پورتها راحت نیست. اندازهگیری مستقیم ولتاژ دشوار و اندازهگیری جریان تقریباً غیرممکن است. همچنین، شرایط مدار باز و اتصال کوتاهی که برای اندازهگیری پارامترها لازم است، با دقت کافی قابل دستیابی نیستند. در پیادهسازیهای موجبر، مفاهیم ولتاژ و جریان مدار کاملاً بیمعنا هستند. در عوض، از ماتریسهای تبدیلی استفاده میشود که از متغیرهای متفاوتی بهره میبرند. این متغیرها، توانهای ورودی به پورت و بازتابشده از آن هستند که در فناوری خط انتقال به راحتی قابل اندازهگیریاند. شناختهشدهترین و پرکاربردترین این پارامترها، پارامترهای پراکندگی یا پارامترهای-S هستند.[۸]
سامانههای مکانیکی و دیگر سامانهها

مفهوم امپدانس مکانیکی را میتوان از طریق قیاس مکانیکی-الکتریکی به حوزههای مکانیکی و دیگر حوزهها تعمیم داد. بنابراین، پارامترهای امپدانس و دیگر پارامترهای شبکههای دو-پورت را میتوان به حوزه مکانیکی نیز گسترش داد. برای این کار، یک متغیر تلاش و یک متغیر جریان به ترتیب به عنوان معادل ولتاژ و جریان در نظر گرفته میشوند. برای سامانههای مکانیکی انتقالی، این متغیرها به ترتیب نیرو و سرعت هستند.[۹]
بیان رفتار یک جزء مکانیکی به عنوان یک دو-پورت یا چند-پورت با ماتریس تبدیل مفید است، زیرا مانند مدارهای الکتریکی، این جزء نیز میتواند به صورت معکوس عمل کند و رفتار آن به بارهای ورودی و خروجی وابسته است. برای مثال، یک چرخدنده اغلب به سادگی با نسبت دنده خود (یک تابع تبدیل SISO) مشخص میشود. اما محور خروجی جعبهدنده را میتوان چرخاند تا محور ورودی را بچرخاند، که این امر نیازمند تحلیل MIMO است. در این مثال، متغیرهای تلاش و جریان به ترتیب گشتاور (T) و سرعت زاویهای (ω) هستند. ماتریس تبدیل بر حسب پارامترهای-z به شکل زیر خواهد بود:

با این حال، پارامترهای-z لزوماً راحتترین راه برای توصیف چرخدندهها نیستند. یک چرخدنده معادل یک ترانسفورماتور الکتریکی است و پارامترهای هیبریدی (h-parameters) ترانسفورماتورها را بهتر توصیف میکنند، زیرا مستقیماً شامل نسبت دورها (معادل نسبت دندهها) هستند.[۱۰] ماتریس تبدیل جعبهدنده در قالب پارامترهای-h به صورت زیر است:

که در آن:
- h21 نسبت سرعت جعبهدنده بدون بار در خروجی است.
- h12 نسبت گشتاور در جهت معکوس با محور ورودی ثابت است که برای یک جعبهدنده ایدهآل برابر با نسبت سرعت در جهت مستقیم است.
- h11 امپدانس مکانیکی دورانی ورودی بدون بار در محور خروجی است که برای یک جعبهدنده ایدهآل صفر است.
- h22 ادمیتانس مکانیکی دورانی خروجی با محور ورودی ثابت است.
برای یک چرخدنده ایدهآل بدون تلفات (اصطکاک، تغییر شکل و غیره)، این ماتریس به صورت زیر ساده میشود:

که در آن N نسبت دنده است.[۱۱]
مبدلها و عملگرها

در سامانهای که از چندین حوزه انرژی تشکیل شده است، به ماتریسهای تبدیلی نیاز است که بتوانند اجزایی با پورتهایی در حوزههای مختلف را مدیریت کنند. در رباتیک و مکاترونیک، عملگرها ضروری هستند. این اجزا معمولاً شامل یک مبدل هستند که به عنوان مثال، سیگنالهای سامانه کنترل در حوزه الکتریکی را به حرکت در حوزه مکانیکی تبدیل میکنند. سامانه کنترل همچنین به حسگرهایی نیاز دارد که حرکت را تشخیص داده و از طریق یک مبدل دیگر آن را به حوزه الکتریکی بازگردانند تا حرکت بتواند از طریق یک حلقه بازخورد به درستی کنترل شود.
یک مثال ساده، یک عملگر الکترومکانیکی است که توسط یک کنترلکننده الکترونیکی هدایت میشود. این سامانه به یک مبدل با یک پورت ورودی در حوزه الکتریکی و یک پورت خروجی در حوزه مکانیکی نیاز دارد. این را میتوان به سادگی با یک تابع تبدیل SISO نمایش داد، اما به دلایلی که قبلاً ذکر شد، نمایش دقیقتر با یک ماتریس تبدیل دو-ورودی و دو-خروجی MIMO به دست میآید. این ماتریس در قالب پارامترهای-z به شکل زیر است:

که در آن F نیروی اعمالشده به عملگر و v سرعت حاصل از عملگر است. پارامترهای امپدانس در اینجا ترکیبی از واحدها هستند: z11 یک امپدانس الکتریکی، z22 یک امپدانس مکانیکی و دو پارامتر دیگر ترانسامپدانس با واحدهای ترکیبی هستند.[۱۲]
سامانههای آکوستیک
سامانههای آکوستیکی زیرمجموعهای از دینامیک سیالات هستند و در هر دو زمینه، متغیرهای اصلی ورودی و خروجی، فشار (P) و دبی حجمی (Q) هستند، مگر در مواردی که صدا از طریق اجزای جامد عبور میکند. در حالت دوم، متغیرهای اصلی مکانیک، یعنی نیرو و سرعت، مناسبتر هستند. یک نمونه از یک جزء آکوستیکی دو-پورت، یک فیلتر مانند صداخفهکن در سامانه اگزوز است. نمایش ماتریس تبدیل آن ممکن است به شکل زیر باشد:

در اینجا، Tmn پارامترهای انتقال یا پارامترهای ABCD هستند. این جزء را میتوان به همان راحتی با پارامترهای-z توصیف کرد، اما پارامترهای انتقال مزیت ریاضیاتی دارند، زمانی که با سامانهای از دو-پورتهای متصل به صورت آبشاری (خروجی یکی به ورودی دیگری) سروکار داریم. در چنین مواردی، پارامترهای انتقال کلی به سادگی با ضرب ماتریسی ماتریسهای پارامتر انتقال اجزای تشکیلدهنده به دست میآیند.[۱۳]
متغیرهای سازگار
هنگام کار با متغیرهای ترکیبی از حوزههای انرژی مختلف، باید در نظر گرفت که کدام متغیرها را میتوان معادل یکدیگر دانست. این انتخاب به هدف تحلیل بستگی دارد. اگر هدف، مدلسازی صحیح جریان انرژی در سراسر سامانه باشد، یک جفت متغیر که حاصلضربشان توان است (متغیرهای مزدوج توان) در یک حوزه انرژی، باید به متغیرهای مزدوج توان در حوزههای دیگر نگاشت شوند. متغیرهای مزدوج توان منحصر به فرد نیستند، بنابراین باید دقت کرد که از یک نگاشت یکسان در سراسر سامانه استفاده شود.[۱۴]
یک نگاشت رایج (که در برخی از مثالهای این مقاله استفاده شده) متغیرهای تلاش (متغیرهایی که یک عمل را آغاز میکنند) از هر حوزه را با هم و متغیرهای جریان (متغیرهایی که ویژگی یک عمل هستند) را با هم نگاشت میکند. هر جفت متغیر تلاش و جریان، مزدوج توان است. این سامانه به عنوان قیاس امپدانسی شناخته میشود، زیرا نسبت متغیر تلاش به جریان در هر حوزه، معادل امپدانس الکتریکی است.[۱۵]
دو سامانه مزدوج توان دیگر نیز وجود دارند که بر اساس همین متغیرها عمل میکنند. قیاس حرکتی (Mobility analogy) نیروی مکانیکی را به جای ولتاژ، به جریان الکتریکی نگاشت میکند. این قیاس به طور گسترده توسط طراحان فیلترهای مکانیکی و همچنین در الکترونیک صوتی استفاده میشود. مزیت این نگاشت، حفظ توپولوژیهای شبکه در حوزههای مختلف است، اما نگاشت امپدانسها را حفظ نمیکند. قیاس ترنت، متغیرهای مزدوج توان را به دو دسته متغیرهای عرضی (across) و گذری (through) طبقهبندی میکند. این قیاس تا حد زیادی مشابه قیاس حرکتی است، مگر در حوزه جریان سیالات (شامل آکوستیک) که در آن فشار معادل ولتاژ در نظر گرفته میشود.
برخی قیاسهای رایج وجود دارند که از جفتهای مزدوج توان استفاده نمیکنند. برای حسگرها، مدلسازی صحیح جریان انرژی ممکن است چندان مهم نباشد. حسگرها اغلب مقادیر بسیار کمی از انرژی را از سامانه استخراج میکنند. انتخاب متغیرهایی که اندازهگیری آنها راحت است، بهویژه متغیرهایی که حسگر در حال اندازهگیری آنهاست، ممکن است مفیدتر باشد. برای مثال، در قیاس مقاومت حرارتی، مقاومت حرارتی معادل مقاومت الکتریکی در نظر گرفته میشود که در نتیجه، اختلاف دما و توان حرارتی به ترتیب به ولتاژ و جریان نگاشت میشوند. مزدوج توان اختلاف دما، توان حرارتی نیست، بلکه نرخ جریان آنتروپی است که مستقیماً قابل اندازهگیری نیست.
تاریخچه
نمایش ماتریسی معادلات جبری خطی از مدتها پیش شناخته شده بود. آنری پوانکاره در سال ۱۹۰۷ اولین کسی بود که یک مبدل را به عنوان یک جفت از چنین معادلاتی توصیف کرد که متغیرهای الکتریکی (ولتاژ و جریان) را به متغیرهای مکانیکی (نیرو و سرعت) مرتبط میکردند. وگل در سال ۱۹۲۱ اولین کسی بود که این معادلات را بر حسب امپدانس مکانیکی و همچنین امپدانس الکتریکی بیان کرد.[۱۶]
اولین استفاده از ماتریسهای تبدیل برای نمایش یک سامانه کنترل MIMO توسط بوکسنبوم و هود در سال ۱۹۵۰ انجام شد، اما تنها برای مورد خاص موتورهای توربین گازی که آنها برای NACA مطالعه میکردند.[۱۷] کروکشنک در سال ۱۹۵۵ پایهای محکمتر برای این روش فراهم کرد، اما بدون کلیت کامل. کاوانا در سال ۱۹۵۶ اولین تحلیل کاملاً عمومی را ارائه داد، رابطه ماتریسی بین سامانه و کنترل را برقرار کرد و معیارهایی برای تحققپذیری یک سامانه کنترل که بتواند رفتار مشخصی را در سامانه تحت کنترل ایجاد کند، ارائه داد.[۱۸]
جستارهای وابسته
پانویس
- ↑ Chen, p. 1038
- ↑ Levine, p. 481,Chen, pp. 1037–1038
- ↑ Kavanagh, p. 350
- ↑ Chen, pp. 54–55 & Iyer, p. 240 & Bakshi & Bakshi, p. 420
- ↑ Choma, p. 197
- ↑ Yang & Lee, pp. 37–38
- ↑ Bessai, pp. 4–5
- ↑ Nguyen, p. 271 & Bessai, p. 1
- ↑ Busch-Vishniac, pp. 19–20
- ↑ Olsen, pp. 239–240
- ↑ Busch-Vishniac, p. 20, Koenig & Blackwell, p. 170
- ↑ Pierce, p. 200
- ↑ Munjal, p. 81
- ↑ Busch-Vishniac, p. 18
- ↑ Busch-Vishniac, p. 20
- ↑ Pierce, p. 200
- ↑ Kavanagh, p. 350, Bokenham & Hood, p. 581
- ↑ Kavanagh, pp. 349–350
منابع
- Bessai, Horst, MIMO Signals and Systems, Springer, 2006 شابک ۰۳۸۷۲۷۴۵۷X.
- Bakshi, A.V.; Bakshi, U.A., Network Theory, Technical Publications, 2008 شابک ۸۱۸۴۳۱۴۰۲۷.
- Boksenbom, Aaron S.; Hood, Richard, "General algebraic method applied to control analysis of complex engine types", NACA Report 980, 1950.
- Busch-Vishniac, Ilene J., Electromechanical Sensors and Actuators, Springer, 1999 شابک ۰۳۸۷۹۸۴۹۵X.
- Chen, Wai Kai, The Electrical Engineering Handbook, Academic Press, 2004 شابک ۰۰۸۰۴۷۷۴۸۸.
- Choma, John, Electrical Networks: Theory and Analysis, Wiley, 1985 شابک ۰۴۷۱۰۸۵۲۸۶.
- Cruickshank, A. J. O., "Matrix formulation of control system equations", The Matrix and Tensor Quarterly, vol. 5, no. 3, p. 76, 1955.
- Iyer, T. S. K. V., Circuit Theory, Tata McGraw-Hill Education, 1985 شابک ۰۰۷۴۵۱۶۸۱۷.
- Kavanagh, R. J., "The application of matrix methods to multi-variable control systems", Journal of the Franklin Institute, vol. 262, iss. 5, pp. 349–367, November 1956.
- Koenig, Herman Edward; Blackwell, William A., Electromechanical System Theory, McGraw-Hill, 1961 اُسیالسی ۵۶۴۱۳۴
- Levine, William S., The Control Handbook, CRC Press, 1996 شابک ۰۸۴۹۳۸۵۷۰۹.
- Nguyen, Cam, Radio-Frequency Integrated-Circuit Engineering, Wiley, 2015 شابک ۱۱۱۸۹۳۶۴۸۵.
- Olsen A., "Characterization of Transformers by h-Paraameters", IEEE Transactions on Circuit Theory, vol. 13, iss. 2, pp. 239–240, June 1966.
- Pierce, Allan D. Acoustics: an Introduction to its Physical Principles and Applications, Acoustical Society of America, 1989 شابک ۰۸۸۳۱۸۶۱۲۸.
- Poincaré, H., "Etude du récepteur téléphonique", Eclairage Electrique, vol. 50, pp. 221–372, 1907.
- Wegel, R. L., "Theory of magneto-mechanical systems as applied to telephone receivers and similar structures", Journal of the American Institute of Electrical Engineers, vol. 40, pp. 791–802, 1921.
- Yang, Won Y.; Lee, Seung C., Circuit Systems with MATLAB and PSpice, Wiley 2008, شابک ۰۴۷۰۸۲۲۴۰۶.