نمایش فضای حالت
در مهندسی کنترل و شناسایی سیستم، نمایش فضایحالت (به انگلیسی: state-space representation)، یک مدل ریاضی از یک سیستم فیزیکی است که از متغیرهای حالت برای ردیابی چگونگی شکلگیری رفتار سیستم توسط ورودیها در طول زمان از طریق معادلات دیفرانسیل مرتبه اول یا معادلات تفاضلی استفاده میکند. این متغیرهای حالت بر اساس مقادیر و ورودیهای فعلی خود تغییر میکنند، در حالی که خروجیها به حالتها و گاهی به ورودیها نیز بستگی دارند. فضای حالت (به انگلیسی: state space) (که به آن رویکرد حوزهٔ-زمان (به انگلیسی: time-domain approach) نیز گفته میشود و معادل فضای فاز در برخی سیستمهای دینامیکی است) یک فضای هندسی است که در آن محورها، این متغیرهای حالت هستند و حالت سیستم توسط یک بردار حالت نمایش داده میشود.
برای سیستمهای خطی، تغییرناپذیر با زمان و با ابعادِمحدود، معادلات را میتوان به شکل ماتریسی نوشت،[۱][۲] یک جایگزین فشرده برای تبدیلهای لاپلاس حوزه فرکانس برای سیستمهای چند ورودی و چند خروجی (MIMO) ارائه میدهد. برخلاف رویکرد حوزه فرکانس، این رویکرد برای سیستمهایی فراتر از سیستمهای خطی با شرایط اولیه صفر نیز کار میکند. این رویکرد، نظریه سیستمها را به یک چارچوب جبری تبدیل میکند و امکان استفاده از ساختارهای کرونکر را برای تحلیل کارآمد فراهم میکند.
مدلهای فضایحالت در زمینههایی مانند علم اقتصاد،[۳] آمار،[۴] علوم رایانه، مهندسی برق،[۵] و علوم اعصاب کاربرد دارند.[۶] به عنوان مثال، در اقتصادسنجی، مدلهای فضایحالت میتوانند برای تجزیه یک سری زمانی به روند و چرخه، ترکیب شاخصهای منفرد در یک شاخص ترکیبی،[۷] شناسایی نقاط عطف چرخه تجاری و تخمین تولید ناخالص داخلی با استفاده از سریهای زمانی پنهان و مشاهدهنشده استفاده شوند.[۸][۹] بسیاری از کاربردها برای تولید تخمینهایی از متغیرهای حالت ناشناخته فعلی با استفاده از مشاهدات قبلی خود، به فیلتر کالمن یا یک ناظر حالت متکی هستند.[۱۰][۱۱]
متغیرهای حالت
متغیرهای حالت داخلی کوچکترین زیرمجموعه ممکن از متغیرهای سیستم هستند که میتوانند کل حالت سیستم را در هر زمان معین نشان دهند.[۱۲] حداقل تعداد متغیرهای حالت مورد نیاز برای نمایش یک سیستم معین، معمولاً برابر با مرتبه معادله دیفرانسیل تعریفکننده سیستم است، اما نه لزوماً. اگر سیستم به شکل تابع تبدیل نمایش داده شود، حداقل تعداد متغیرهای حالت برابر با مرتبه مخرج تابع تبدیل پس از کاهش آن به یک کسر صحیح است. درک این نکته مهم است که تبدیلِ یک تحقق فضایحالت بهشکل تابع تبدیل ممکن است برخی از اطلاعات داخلی در مورد سیستم را از دست بدهد و ممکن است توصیفی از سیستمی ارائه دهد که پایدار است، در حالی که تحقق فضایحالت در نقاط خاصی ناپایدار است. در مدارهای الکتریکی، تعداد متغیرهای حالت اغلب، هرچند نه همیشه، برابر با تعداد عناصر ذخیره انرژی در مدار مانند خازنها و سلفها است. متغیرهای حالت تعریف شده باید به صورت خطی مستقل باشند، یعنی هیچ متغیر حالتی را نمیتوان به صورت ترکیبی خطی از سایر متغیرهای حالت دیگر نوشت، در غیر این صورت سیستم قابل حل نیست.

سیستمهای خطی
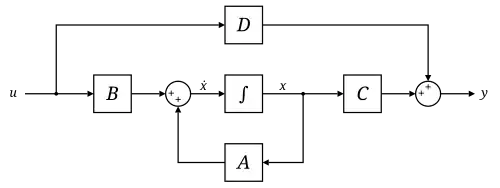
عمومیترین نمایش فضایحالت یک سیستم خطی با ورودیها، خروجیها و متغیرهای حالت به شکل زیر نوشته میشوند:[۱۳]




کهدراینجا:
- «بردار حالت» نامیده میشود", ;
- «بردار خروجی» نامیده میشود، ;
- «بردار ورودی (یا کنترل)» نامیده میشود. , ;
- ماتریس حالت (یا سیستم) , ,
- «ماتریس ورودی» است، ,
- «ماتریس خروجی» است، ,
- ماتریس «پیشخورد (یا پیشخور)» است. (در مواردی که مدل سیستم دارای تغذیه مستقیم نیست، ماتریس صفر است), ,
- .







![{\displaystyle \dim[\mathbf {A} (\cdot )]=n\times n}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/36132ac686feb5a155148ce1af3c4b1cde26d963.svg)

![{\displaystyle \dim[\mathbf {B} (\cdot )]=n\times p}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/399a639fe2c75cc2dc72e069fba832a235d70bca.svg)

![{\displaystyle \dim[\mathbf {C} (\cdot )]=q\times n}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/0f0734c77f3aaf2ece3c896f20be30bb971eed19.svg)

![{\displaystyle \dim[\mathbf {D} (\cdot )]=q\times p}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/5067c86df8b8b6881aa5adc6876fd9ee762cc088.svg)

در این فرمولبندی کلی، همه ماتریسها میتوانند متغیر با زمان باشند (یعنی عناصر آنها میتوانند به زمان وابسته باشند)؛ با این حال، در حالت معمول اِلتیآی، ماتریسها ناوَردا با زمان خواهند بود. متغیر زمان میتواند پیوسته باشد (مثلاً ) یا گسسته (مثلاً ). در حالت دوم، متغیر زمان معمولاً بهجای استفاده میشود. سیستمهای ترکیبی امکان استفاده از حوزههای زمان با بخشهای پیوسته و گسسته را فراهم میکنند. بسته به فرضیات انجام شده، نمایش مدل فضایحالت میتواند به شکلهای زیر باشد:




| نوع سیستم | مدل فضایحالت |
|---|---|
| پیوسته تغییرناپذیر با زمان | |
| متغیر با زمان، پیوسته | |
| گسسته صریح متغیر با زمان | |
| متغیر با زمان گسسته صریح | |
| حوزه لاپلاس پیوستهٔ تغییرناپذیر با زمان | |
| حوزه-Z گسستهٔ-تغییرناپذیر با زمان |










مثال: مورد اِلتیآی زمانپیوسته
ویژگیهای پایداری و پاسخ طبیعی یک سیستم اِلتیآی زمان پیوسته (یعنی خطی با ماتریسهایی که نسبت به زمان ثابت هستند) را میتوان از مقادیر ویژه ماتریس مطالعه کرد. پایداری یک مدل فضایحالت تغییرناپذیر با زمان (ناوَردا با زمان) را میتوان با نگاه کردن به تابع تبدیل سیستم به صورت فاکتورگیری شده تعیین کرد. سپس چیزی شبیه به این خواهد بود:


مخرج تابع تبدیل برابر با چندجملهای مشخصه است که با گرفتن دترمینان از به دست میآید ، ریشههای این چندجملهای (مقادیر ویژه) قطبهای تابع تبدیل سیستم هستند (یعنی نقاط تکین که در آنها اندازه تابع تبدیل نامحدود است). از این قطبها میتوان برای تحلیل پایداری مجانبی یا پایداری حاشیهای سیستم استفاده کرد. یک رویکرد جایگزین برای تعیین پایداری، که شامل محاسبه مقادیر ویژه نمیشود، تحلیل پایداری لیاپانوف سیستم است.


صفرهای موجود در صورت کسر بهطور مشابه میتوان از آن برای تعیین اینکه آیا سیستم کمینه فاز است یا خیر، استفاده کرد.

این سیستم ممکن است همچنان ورودی-خروجی پایدار باشد (به پایداری بایبو مراجعه کنید) حتی اگر از نظر داخلی پایدار نباشد. این امر در صورتی ممکن است که قطبهای ناپایدار توسط صفرها حذف شوند (یعنی اگر آن نقاط تکین در تابع تبدیل برداشتنی باشند).
کنترلپذیری
شرط کنترلپذیری حالت دلالت بر این دارد که ممکن است – توسط ورودیهای قابل قبول - برای هدایت حالتها از هر مقدار اولیه به هر مقدار نهایی در یک پنجره زمانی محدود. یک مدل فضایحالت خطی نامتغیر با زمان پیوسته، کنترلپذیر است اگر و فقط اگر که در آن رتبه تعداد سطرهای مستقل خطی در یک ماتریس و n تعداد متغیرهای حالت است.

مشاهدهپذیری
مشاهدهپذیری معیاری است برای اینکه چقدر میتوان حالتهای داخلی یک سیستم را با آگاهی از خروجیهای خارجی آن استنباط کرد. مشاهدهپذیری و کنترلپذیری یک سیستم دوگانهای ریاضی هستند (یعنی، همانطور که کنترلپذیری تضمین میکند که ورودیای در دسترس باشد که هر حالت اولیه را به هر حالت نهایی مطلوب برساند، مشاهدهپذیری نیز تضمین میکند که دانستن مسیر خروجی، اطلاعات کافی برای پیشبینی حالت اولیه سیستم را فراهم میکند).
یک مدل فضایحالت خطی نامتغیر زمان پیوسته، مشاهدهپذیر است اگر و تنها اگر

تابع تبدیل
«تابع تبدیل» یک مدل فضایحالت خطی نامتغیر با زمان پیوسته را میتوان به روش زیر بدست آورد:
ابتدا، با در نظر گرفتن تبدیل لاپلاس از
نتیجه میدهد در مرحله بعد، برای ، میدهد و بدین ترتیب




جایگزینی برای در معادله خروجی
میدهد


با فرض شرایط اولیه صفر و یک سیستم تکورودی تکخروجی (SISO)، تابع تبدیل به صورت نسبت خروجی به ورودی تعریف میشود. با این حال، برای یک سیستم چندورودی چندخروجی (MIMO)، این نسبت تعریف نشده است؛ بنابراین، با فرض شرایط اولیه صفر، ماتریس تابع تبدیل از رابطه زیر بدست میآید:



با استفاده از روش برابر قرار دادن ضرایب که نتیجه میدهد

در نتیجه، ماتریسی با بعد است که شامل توابع تبدیل برای هر ترکیب ورودی-خروجی است. به دلیل سادگی این نمادگذاری ماتریسی، نمایش فضایحالت معمولاً برای سیستمهای چندورودی-چندخروجی استفاده میشود. ماتریس سیستم روزنبروک پُلی بین نمایش فضایحالت و تابع تبدیل آن فراهم میکند.

تحققهای متعارف
هر تابع تبدیل داده شده که اکیدا سِرِه باشد، میتواند به راحتی با رویکرد زیر به فضایحالت منتقل شود (این مثال برای یک سیستم چهار-بُعدی، تکورودی، تکخروجی است):
با داشتن یک تابع تبدیل، آن را بسط دهید تا تمام ضرایب هم در صورت و هم در مخرج نشان داده شوند. این باید به فرم زیر منجر شود:

اکنون میتوان ضرایب را مستقیماً با روش زیر در مدل فضایحالت وارد کرد:


این تحقق فضایحالت، فرم متعارف کنترلپذیر (به انگلیسی: controllable canonical form) نامیده میشود زیرا تضمین میشود که مدل حاصل، کنترلپذیر باشد (یعنی، چون کنترل وارد زنجیرهای از انتگرالگیرها میشود، قابلیت جابجایی هر حالت را دارد).
ضرایب تابع تبدیل همچنین میتوانند برای ساخت نوع دیگری از فرم متعارف استفاده شوند.


این تحقق فضایحالت، فرم متعارف مشاهدهپذیر (به انگلیسی: observable canonical form) نامیده میشود زیرا مدل حاصل تضمین میکند که مشاهدهپذیر باشد (یعنی، از آنجا که خروجی از زنجیرهای از انتگرالگیرها خارج میشود، هر حالت بر خروجی تأثیر میگذارد).
توابع انتقال سِرِه (مناسب)
توابع تبدیلی که فقط سره (و نه کاملاً سره) هستند نیز میتوانند به راحتی تحقق یابند. نکته در اینجا این است که تابع تبدیل را به دو بخش تقسیم کنیم: یک بخش کاملاً سره و یک ثابت.

سپس میتوان تابع تبدیل اکیداً سره را با استفاده از فنونهای نشان داده شده در بالا به یک تحقق فضایحالت متعارف تبدیل کرد. تحقق فضایحالت ثابت بهطور بدیهی سپس با هم، یک تحقق فضایحالت با ماتریسهای A , B و C که توسط بخش اکیداً سره و ماتریس D که توسط ثابت تعیین میشوند، به دست میآوریم.

برای روشن شدن موضوع کمی مثالی میزنیم: که منجر به تحقق کنترلپذیری زیر میشود توجه کنید که خروجی نیز مستقیماً به ورودی بستگی دارد. این به دلیل ثابت در تابع تبدیل است.




بازخورد
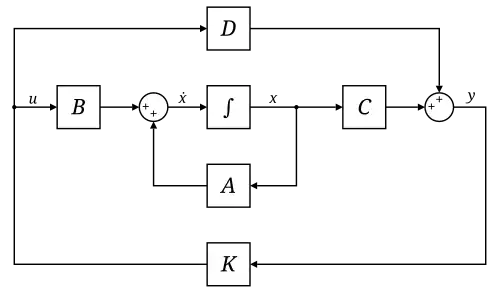
یک روش رایج برای بازخورد، ضرب خروجی در ماتریس K و تنظیم آن به عنوان ورودی سیستم است: از آنجایی که مقادیر K نامقیّد هستند، میتوان به راحتی مقادیر آن را برای بازخورد منفی، منفی کرد. وجود علامت منفی (نمادگذاری رایج) صرفاً یک علامت نمادین است و عدم وجود آن هیچ تأثیری بر نتایج نهایی ندارد.



میشود


حل معادله خروجی برای و با جایگزینی در معادله حالت، نتیجه میشود



مزیت این روش این است که میتوان مقادیر ویژه A را با تنظیم مناسب K از طریق تجزیه ویژه کنترل کرد. این فرض میکند که سیستم حلقه بسته کنترلپذیر است یا اینکه مقادیر ویژه ناپایدار A را میتوان از طریق انتخاب مناسب K پایدار کرد.

مثال
برای یک سیستم اکیداً سره ، D برابر با صفر است. یک موقعیت نسبتاً رایج دیگر زمانی است که همه حالتها خروجی هستند، یعنی y = x که منجر به C = I، ماتریس همانی، میشود. این امر منجر به معادلات سادهتر میشود.


این امر تجزیه ویژه لازم را به فقط کاهش میدهد.

بازخورد با ورودی نقطهتنظیم (مرجع)

علاوه بر بازخورد، یک ورودی، ، میتواند به گونهای اضافه شود که .


میشود


حل معادله خروجی برای و با جایگزینی در معادله حالت، نتیجه میشود


یک سادهسازی نسبتاً رایج برای این دستگاه، حذف D است که معادلات را به صورت زیر کاهش میدهد:


مثال شیء متحرک
یک سیستم خطی کلاسیک، سیستم حرکت یک-بُعدی یک جسم (مثلاً یک گاری) است. قوانین حرکت نیوتن برای جسمی که به صورت افقی روی یک صفحه حرکت میکند و با فنر به دیوار متصل است:

- موقعیت است؛ سرعت است؛ شتاب است
- نیروی اعمالشده است
- ضریب اصطکاک چسبناکی است
- ثابت فنر است
- جرم این جسم است






سپس معادله حالت به صورت زیر خواهد شد:

![{\displaystyle \mathbf {y} (t)=\left[{\begin{matrix}1&0\end{matrix}}\right]\left[{\begin{matrix}\mathbf {x_{1}} (t)\\\mathbf {x_{2}} (t)\end{matrix}}\right]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/089622c024d88e55fb7da811b54574235a1af4a1.svg)
که در اینجا
- نشان دهنده موقعیت جسم است
- سرعت جسم است
- شتاب جسم است
- خروجی موقعیت جسم است



سپس آزمون کنترلپذیری به صورت زیر است:

که برای همه و رتبه کامل (full rank) دارد این بدان معناست که اگر حالت اولیه سیستم ( ، ، ) مشخص باشد و اگر و ثابت باشند، پس نیرویی وجود دارد که میتوانست گاری را به هر موقعیت دیگری در سیستم منتقل کند.

آزمون مشاهدهپذیری به صورت زیر است:

که رتبه کامل را نیز داراست؛ بنابراین، این سیستم هم کنترلپذیر و هم مشاهدهپذیر است.
سیستمهای غیرخطی
شکل کلیتر یک مدل فضایحالت را میتوان به صورت دو تابع نوشت.


اولی معادله حالت و دومی معادله خروجی است. اگر تابع ترکیبی خطی از حالتها و ورودیها باشد، آنگاه معادلات را میتوان مانند بالا به صورت ماتریسی نوشت. اگر سیستم بدونوادارنده (unforced) باشد (یعنی ورودی نداشته باشد)، میتوان آرگومانهای توابع را حذف کرد.

مثال آونگ
یک سیستم غیرخطی کلاسیک، یک آونگ ساده بدون نیرو است.

کج اینجاا
- زاویه آونگ نسبت به جهت گرانش است
- جرم آونگ است (جرم میله آونگ صفر فرض شده است)
- شتاب گرانشی است
- ضریب اصطکاک در نقطه محوری است
- شعاع آونگ (نسبت به مرکز ثقل جرم ) است.



معادلات حالت به صورت زیر هستند:


کج اینجاا
- زاویه آونگ است
- سرعت چرخش آونگ است
- شتاب چرخشی آونگ است


در عوض، معادله حالت را میتوان به فرم کلی نوشت

نقاط تعادل/مانای یک سیستم زمانی هستند که و بنابراین نقاط تعادل یک آونگ، نقاطی هستند که در شرایط زیر صدق میکنند:


برای اعداد صحیح n.
جستارهای وابسته
- مهندسی کنترل
- نظریه کنترل
- مشاهدهپذیری
- کنترلپذیری
- گسستهسازی مدلهای فضایحالت
- فضای فاز برای اطلاعات مربوط به حالت فاز (مانند فضایحالت) در فیزیک و ریاضیات.
- فضایحالت برای اطلاعات مربوط به فضایحالت با حالتهای گسسته در علوم رایانه.
- فیلتر کالمن برای یک کاربرد آماری.
منابع
- ↑ Katalin M. Hangos; R. Lakner & M. Gerzson (2001). Intelligent Control Systems: An Introduction with Examples. Springer. p. 254. ISBN 978-1-4020-0134-5.
- ↑ Katalin M. Hangos; József Bokor & Gábor Szederkényi (2004). Analysis and Control of Nonlinear Process Systems. Springer. p. 25. ISBN 978-1-85233-600-4.
- ↑ Stock, J.H.; Watson, M.W. (2016), "Dynamic Factor Models, Factor-Augmented Vector Autoregressions, and Structural Vector Autoregressions in Macroeconomics", Handbook of Macroeconomics (به انگلیسی), Elsevier, 2: 415–525, doi:10.1016/bs.hesmac.2016.04.002, ISBN 978-0-444-59487-7
- ↑ Durbin, James; Koopman, Siem Jan (2012). Time series analysis by state space methods. Oxford University Press. ISBN 978-0-19-964117-8. OCLC 794591362.
- ↑ Roesser, R. (1975). "A discrete state-space model for linear image processing". IEEE Transactions on Automatic Control. 20 (1): 1–10. doi:10.1109/tac.1975.1100844. ISSN 0018-9286.
- ↑ Smith, Anne C.; Brown, Emery N. (2003). "Estimating a State-Space Model from Point Process Observations". Neural Computation. 15 (5): 965–991. doi:10.1162/089976603765202622. ISSN 0899-7667. PMID 12803953.
- ↑ James H. Stock & Mark W. Watson, 1989. "New Indexes of Coincident and Leading Economic Indicators," NBER Chapters, in: NBER Macroeconomics Annual 1989, Volume 4, pages 351-409, National Bureau of Economic Research, Inc.
- ↑ Bańbura, Marta; Modugno, Michele (2012-11-12). "Maximum Likelihood Estimation of Factor Models on Datasets with Arbitrary Pattern of Missing Data". Journal of Applied Econometrics. 29 (1): 133–160. doi:10.1002/jae.2306. ISSN 0883-7252.
{{cite journal}}:|hdl-access=requires|hdl=(help) - ↑ "State-Space Models with Markov Switching and Gibbs-Sampling", State-Space Models with Regime Switching, The MIT Press: 237–274, 2017, doi:10.7551/mitpress/6444.003.0013, ISBN 978-0-262-27711-2
- ↑ Kalman, R. E. (1960-03-01). "A New Approach to Linear Filtering and Prediction Problems". Journal of Basic Engineering (به انگلیسی). 82 (1): 35–45. doi:10.1115/1.3662552. ISSN 0021-9223.
- ↑ Harvey, Andrew C. (1990). Forecasting, Structural Time Series Models and the Kalman Filter. Cambridge: Cambridge University Press. doi:10.1017/CBO9781107049994
- ↑ Nise, Norman S. (2010). Control Systems Engineering (6th ed.). John Wiley & Sons, Inc. ISBN 978-0-470-54756-4.
- ↑ Brogan, William L. (1974). Modern Control Theory (1st ed.). Quantum Publishers, Inc. p. 172.
برای مطالعهٔ بیشتر
- Antsaklis, P. J.; Michel, A. N. (2007). A Linear Systems Primer. Birkhauser. ISBN 978-0-8176-4460-4.
- Chen, Chi-Tsong (1999). Linear System Theory and Design (3rd ed.). Oxford University Press. ISBN 0-19-511777-8.
- Khalil, Hassan K. (2001). Nonlinear Systems (3rd ed.). Prentice Hall. ISBN 0-13-067389-7.
- Hinrichsen, Diederich; Pritchard, Anthony J. (2005). Mathematical Systems Theory I, Modelling, State Space Analysis, Stability and Robustness. Springer. ISBN 978-3-540-44125-0.
- Sontag, Eduardo D. (1999). Mathematical Control Theory: Deterministic Finite Dimensional Systems (PDF) (2nd ed.). Springer. ISBN 0-387-98489-5. Retrieved June 28, 2012.
- Friedland, Bernard (2005). Control System Design: An Introduction to State-Space Methods. Dover. ISBN 0-486-44278-0.
- Zadeh, Lotfi A.; Desoer, Charles A. (1979). Linear System Theory. Krieger Pub Co. ISBN 978-0-88275-809-1.
- On the applications of state-space models in econometrics
- Durbin, J.; Koopman, S. (2001). Time series analysis by state space methods. Oxford, UK: Oxford University Press. ISBN 978-0-19-852354-3.
پیوند به بیرون
رایانش تشخیصپذیر | |||||||
|---|---|---|---|---|---|---|---|
| تابع دیفرانسیلپذیر |
|  | |||||
| Concepts |
| ||||||
| Programming languages | |||||||
| Application | |||||||
| Hardware |
| ||||||
| Software library | |||||||
| Implementation |
| ||||||
| People |
| ||||||
| Organizations |
| ||||||
| |||||||